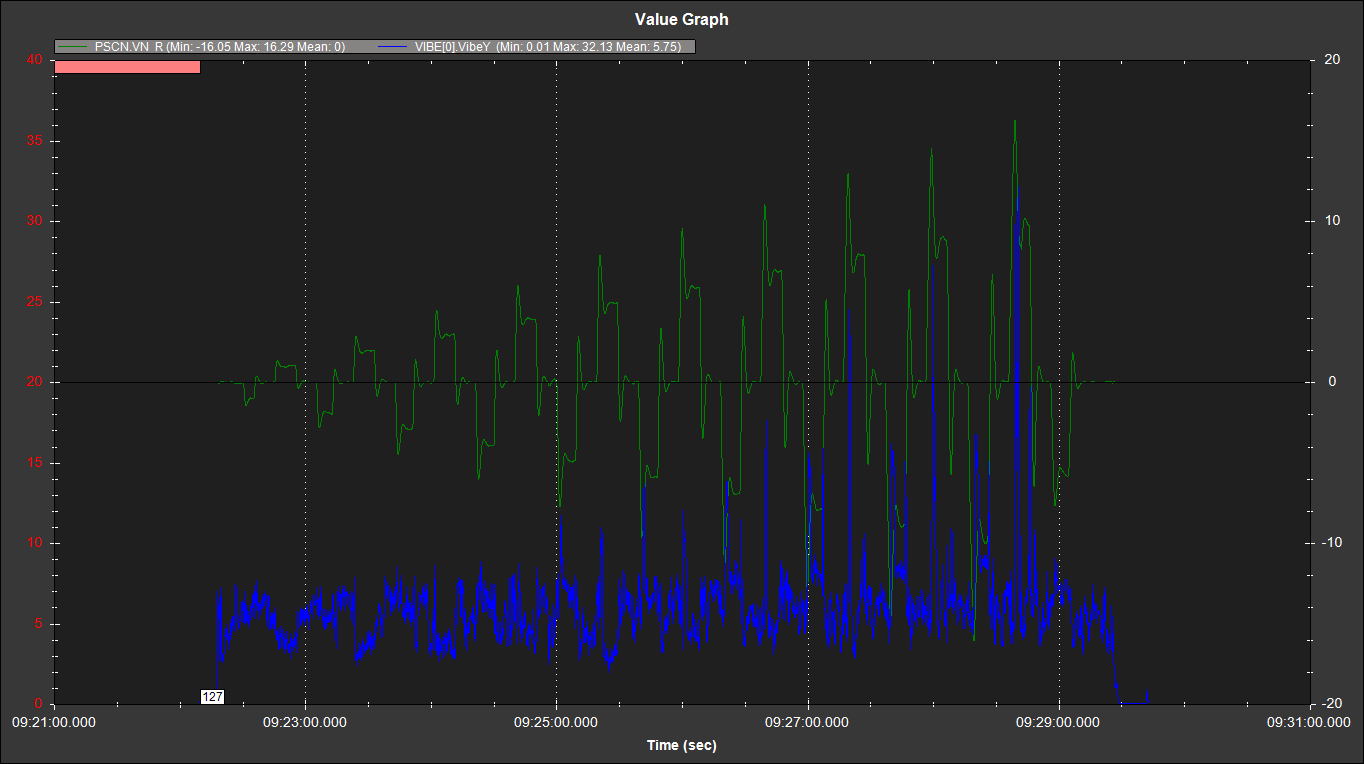
I was doing a horizontal fast mission with increasing speeds. I observed that beyond maximum speed of 7 m/s a spike in vibration is seen particularly at only one point of time. Can someone please confirm if this is frame resonance or something else. I am using tri-blade propeller.
Log
Momentary increases in vibrations during sharp declarations are common in many rotary wing machines. Often it’s related to aerodynamics, but frame resonance can also play a big part. In Betaflight people call it “prop-wash” and they spend a lot of energy tuning their quads to minimize the effects.

Generally, I’d say the tuning on this quad looks really good. So I guess the question is what is your goal for the quad? The quad seemed to handle the speed well, there was no clipping, and the pitch/roll graphs looked spot on during the deceleration.
1 Like
@Allister Thank you for the response.
The goal of this quad is to follow the path as precisely as possible for atleast several hours of flying. I am afraid that this kind of vibration may lead to loosening of bolts.
When there is additional wind during the flight than these kind of vibration should not make the drone unstable. These are the two things I want to ensure.
Should I address this issue or leave it here? If yes can you tell some resources that I should look for?
Loosening of hardware is a potential issue for any quad. Good quality parts, proper build techniques, and dash of thread-lock are all good places to start. I don’t think these vibrations will significantly increase your chances of hardware issues over any other build. If the quad is going to be flying for long duration then a detailed pre and post flight would always be a good plan.
In the brief look of the log I had I didn’t see any signs of instability during the flight. It looked solid.
During the long flights do you plan to have the quad starting/stopping? You’ll get better battery life or better efficiency if you keep it moving at a constant speed. Looks like 6 or 7 m/s (not count for wind because I’m lazy and just using GPS) seems to be the sweet spot for your current flow.

1 Like
@Allister These flights will be shorter duration but many in number and many drones at single time. So it will be difficult to monitor each and every drone. So I want to try my best to make the drone as safe as possible after that I will try to monitor these the logs as efficiently as possible so I don’t miss out on effects of this kind of issue.
Thank you for the response though.