Hello everyone, I have some questions for you. This afternoon, in order to find the value of MOT_THST_HOVER, I tested ALTHOLD MODE.
In the beginning, everything was perfect. I turned on ALTHOLD MODE normally, and the Copter flew up and down as expected. But suddenly Copter began to climb uncontrollably fast. I tried lowering the throttle to control it, but that didn’t work. Then I switched flight mode to Lotier in a panic. But after the next few seconds I realized it. I quickly switched the flight mode to Stabilize. And got Copter under control. When I got home, I reviewed the flight log. What puzzles me is the sudden increase of Throttle Input under Ctun, while the throttle channel of RC Input at the same time has no abnormal input. My question is, shouldn’t Throttle Input equal RC Input Throttle Channle? Why is my Copter suddenly climbing?
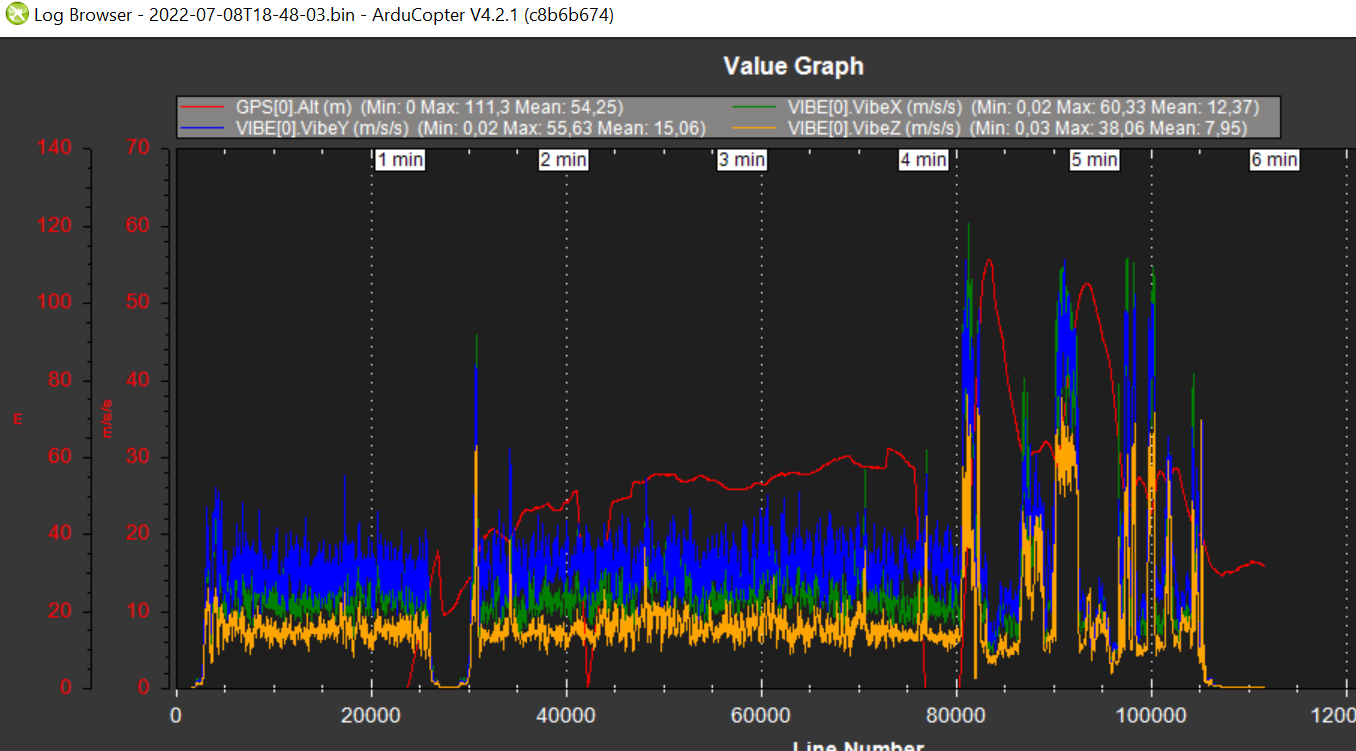
As @Alberto_Ds says high vibes with 1000’s of clipping events. I had a 3" with an Omni V6 Nano and really disliked that Flight Controller. You will need a lot more FC isolation than you have now. And you will need to configure the Dynamic Notch Filter before further Tuning. Those are the flights you should be making now for data collection to configure it. Your GPS is performing poorly also. It actually never switched to Loiter because it had bad position.
Dave,this is my 3 "with Omnibus Nano F4. By working a little you can get good performance … rubber everywhere! ![]()
@Joshua
you should get something similar on your drone too!
Hi Alberto-Yes, that looks really good! I agree, the most compliant mount that is practical will work best on these tiny boards
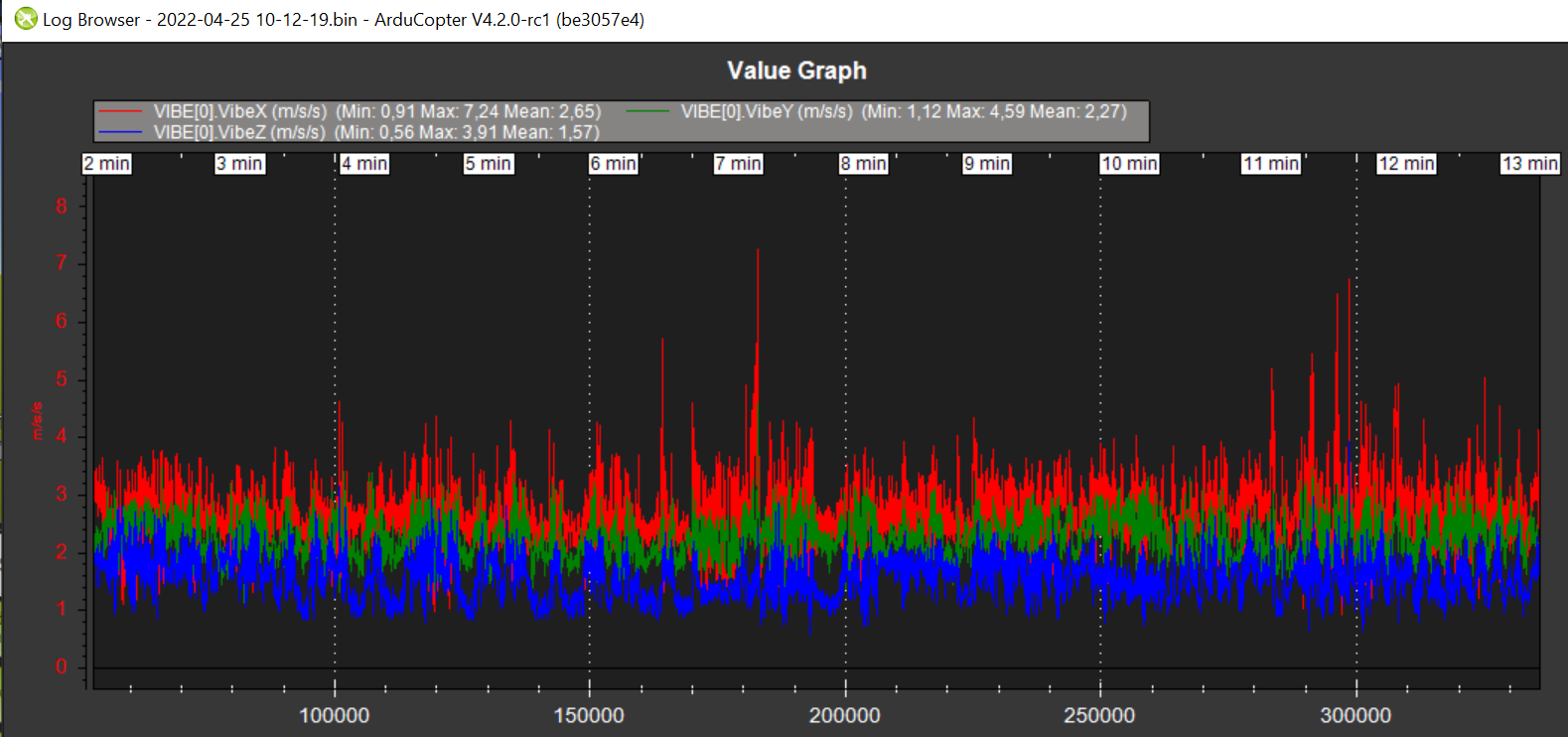
Many thanks to Alberto_Ds. As suggested by Alberto_Ds, I re-improved vibration Damping for the quad. It may also be because of the frame design. After comparing the logs, I found that there is not much improvement for the vibration. Then I just enabled notches for my quad. This operation allows the problem to be greatly improved. Thanks again Alberto_Ds.