hello guys
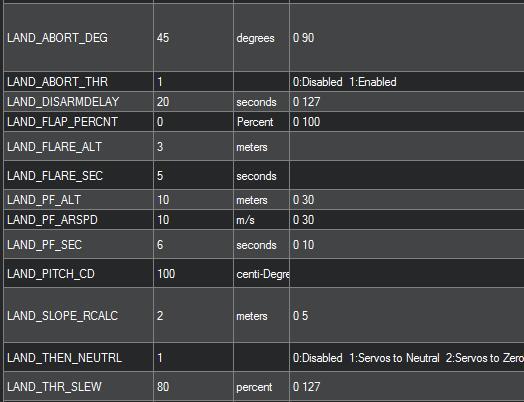
i test my plane in landing with dive,pixhawk framework is arduplane 3.7.0, and the plane without sonar and reveres ESC,i set the all parameter base on the document on the website.
but in landing stage the plane not dive,it is also keep normal pitch to landing. is that sonar and reveres ESC is necessary?
thanks.