I’m using Copter 3.5.5 on a big octocopter.
All setups done (accel, compass, radio, ESC calibration, motor test, etc), default PIDs
Hardware :
Tarot X8 (1050mm)
Dropix v2 upside down (AHRS_ORIENTATION=4)
Hobbywing Xrotor 40A
Tarot 4114 KV 320
Tarot foldable 15x5.5
FrSky X8R
FrSky X9D+ (profile copied from another working quad)
Symptom :
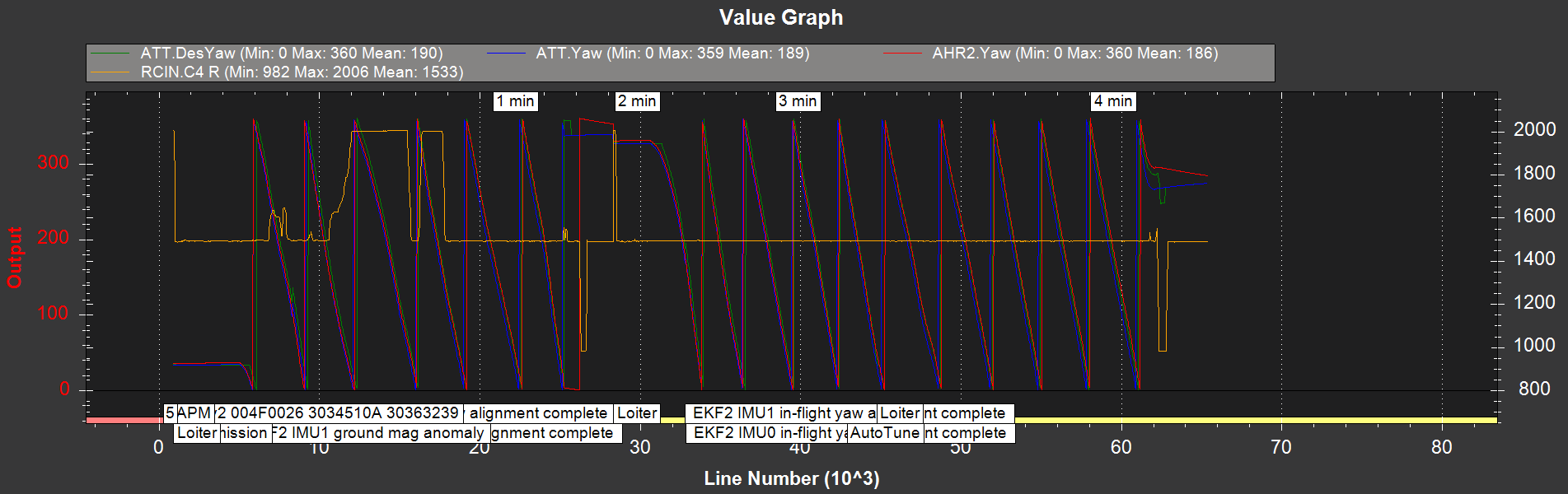
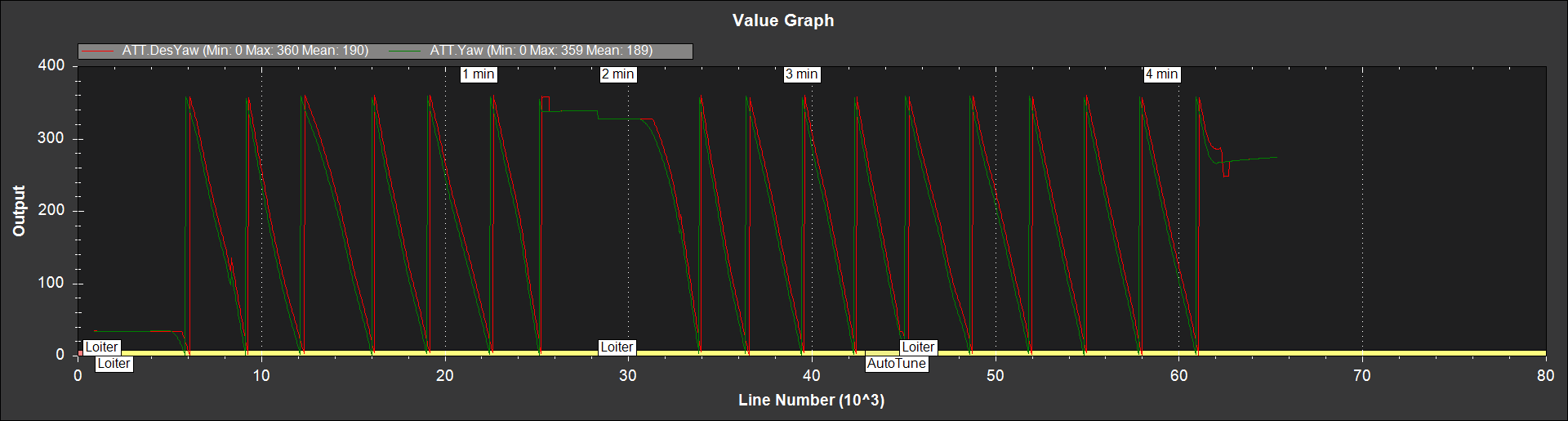
Absolutely no response to Yaw command
RCIN C4 shows stick actions
Takeoff in Loiter is ok, roll & pitch response seems to be good
Vibrations are below 15
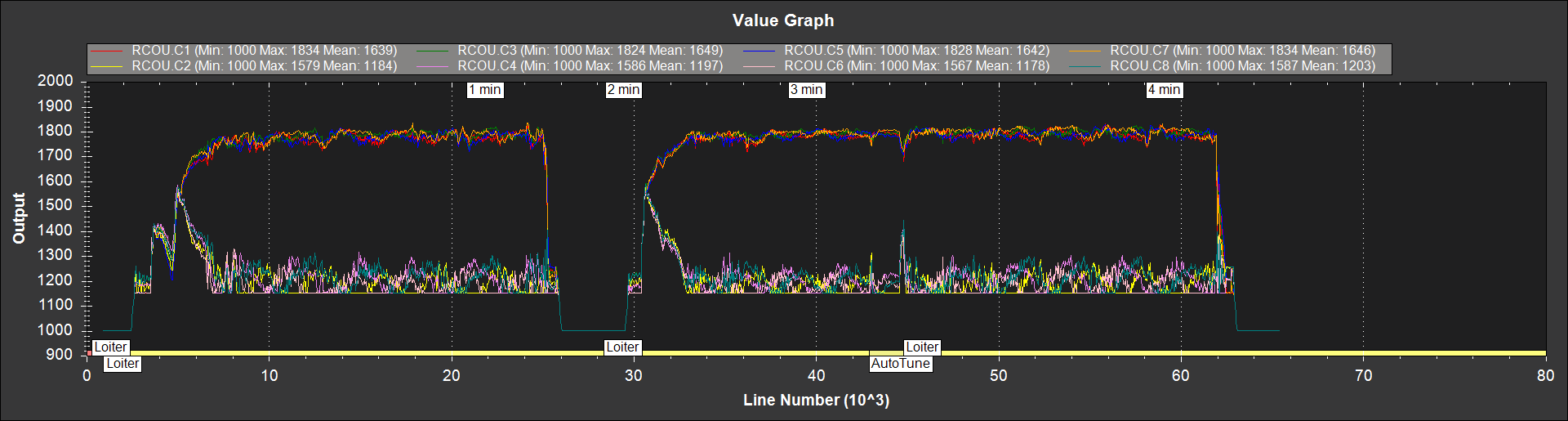
You’re flying on 4 motors.1,3,5,7 all produce thrust.2,4,6 and 8 lose sync or bottom out otherwise.As 1,3,5,7 are the front four motors the octo should flip as soon as you give it throttle.The fact that it’s flying means that your set up is incorrect.And other problems that stem from that.Photos of set up ? Videos of it flying ?
Thanks, I confirm there’s strange things about motor order, I followed motor test order where A, B, C, D, E, F, G and H are in CW sequence but I’m probably wrong as it’s not the same order than the copter motor order documentation (http://ardupilot.org/copter/docs/connect-escs-and-motors.html).
Thanks for analysis, I’ll try it as soon as the weather become kind.