Hello, all developers!
I just have a field test a few days ago. And my boat is never running properly in Auto mode. The boat seems to weave on the water, and the motion direction is random.
I have read the devoloper’s suggestion in the discourse, so i also test the Acro and Steering mode. And I fetch the RCIN and RCOU information in the .BIN log as shown in below. I can’t understand what the drawn curve stand for, and how can I adjust it in order to make it move along the line between waypoints.
The firmware I used is ArduRover 3.4.2, and my boat is equiped with separated steering and throtte. The parameters I set can be checked HERE.
Thanks for your analyzation.
Statement of the problem:
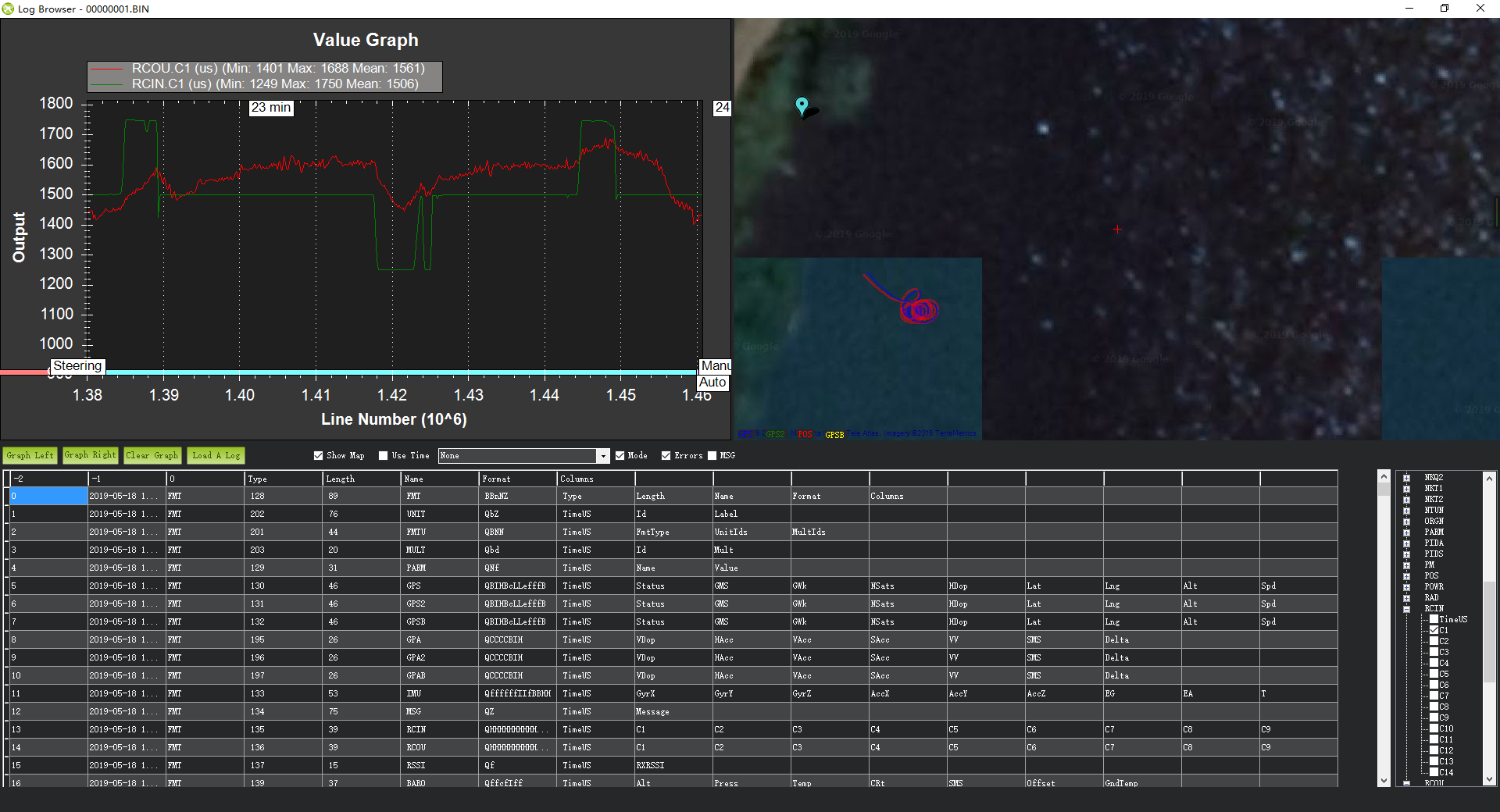
- In Steering mode, the RCIN.C1 and RCOU.C1 are plotted in Fig1.
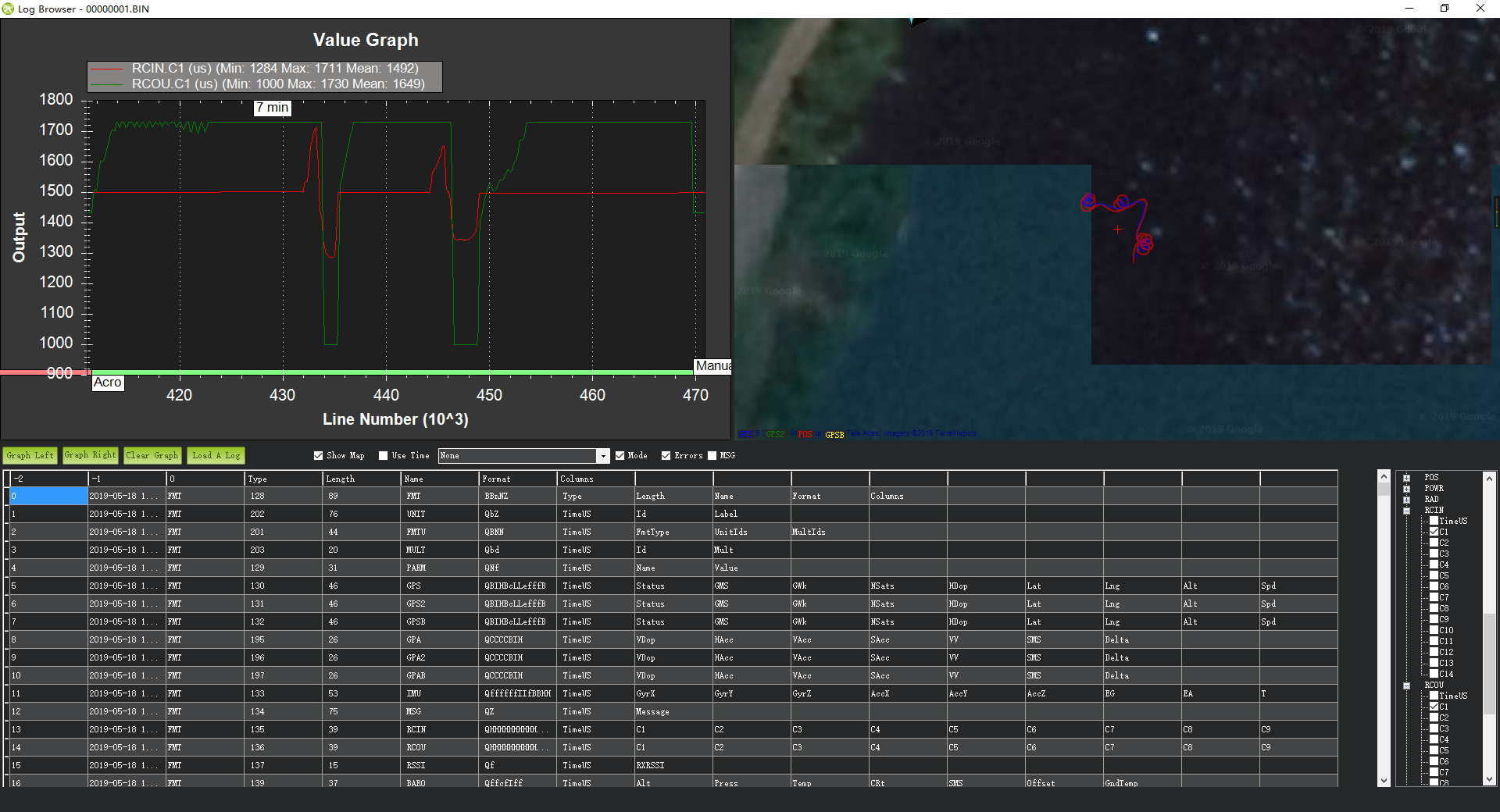
Fig1 - In Acro mode, the RCIN.C1 and RCOU.C1 are plotted in Fig2.
Fig2 - In AUTO mode, it seems that the boat can’t find where to go.