I have built multiple uavs with 3.8beta5.
Now I switched to stable there are 2 issues. One of which I just cannot seem to figue out.
Pixhawk does not pass Throttle to the plane when in manual mode. Works fine in all other modes including FBWA.
I can see channel 3 input in manual mode to, but it does not pass it through. For refrence I have reverse thrusting setup. But I is setup correctly. My TX sends min Throttle 1500 and max 2000. Also I said fbwa mode works fine.
Parameters were carried over from beta05 where it works fine. I have alsi tried setting up from scratch. No luck.
Another thing is my manual input (servos) are extremely limited in fbwa compared to manual mode. I don’t know where this comes from. For example elevator is 50% of normal. This was no issue up till this version. Any ideas what to change for this. Makes even tunning pretty hard.
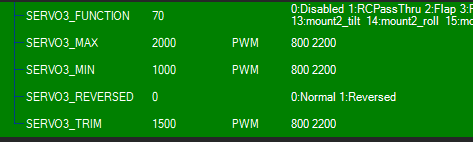
There is a known bug related to having SERVO3_TRIM equal to SERVO3_MIN for reverse thrust. Is that the case for your parameters?
If not, can you please post a DF log or full parameters?
Thx for popping in. No, that is not the case at all. As you can see:
Will post DF log in a moment.One more thing that I noticed which is curious is that in mission planner, if I select to display Ch3% on the user item, it show in reverse. That is say AP is pushing 49% (positive) throttle, it would show -49, and vice versa. When reverse trusting is enabled on autolanding then it was reading positive numbers. Not sure if it is related. As I said again, the curious thing is why it would work firn in FBWA mode and not in Manual. Also was fine in Beta04 and 05. So it must be a change since 06 and final. Now I have tested on second (fixed wing) UAV whole different build, same issue. Lucky customers don’t care as then never dare use manual, but for me, as I tune and maiden, I prefer to start in manual. Same goes for trimming of course.
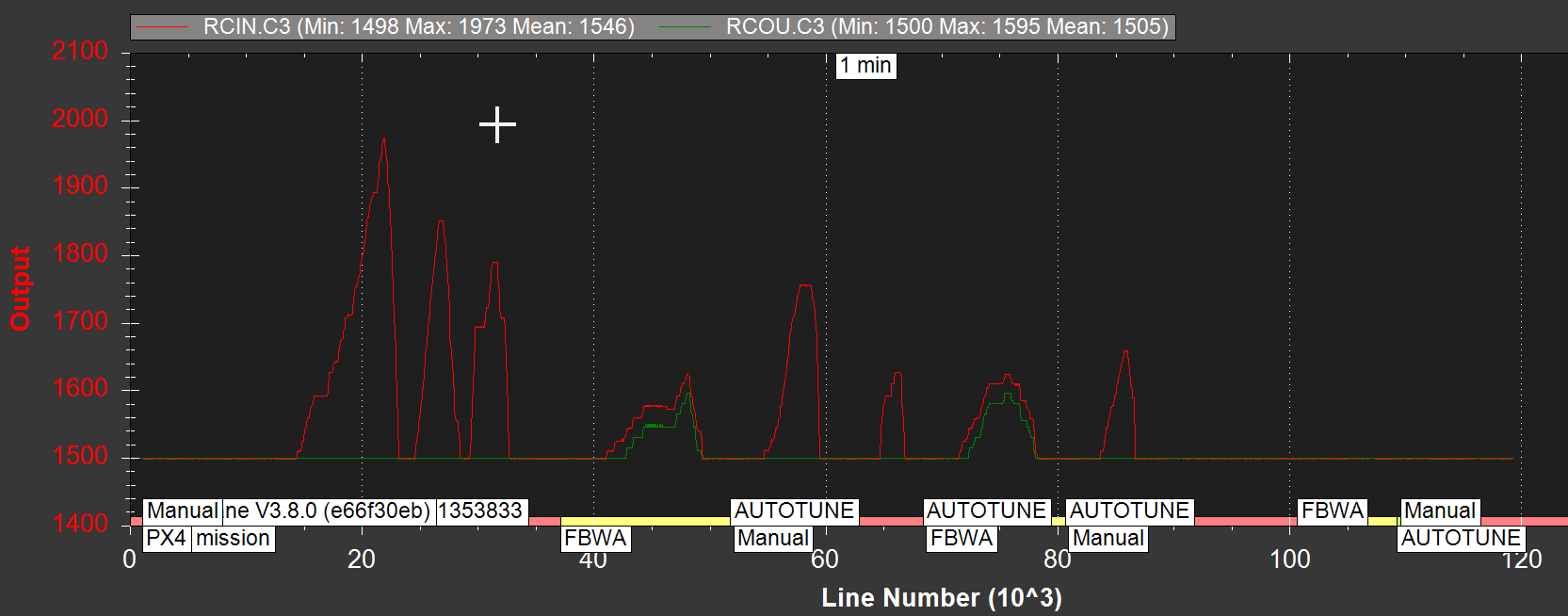
Ok I made a short sample log to show (please download the link). Just took the UAV outside. Let is lock on GPS and initialize. Then I armed it. Default manual mode as you can see. I push throttle, you can see channel 3 RC input. However ch3 servo output is nill. Then don’t change any thing except switch to FBWA mode and not when I push throttle, you can see that there is output also (motors start to spin). Then I switch back to manual, same thing.
PS: Don’t mind the auto-tune markers in the log. It is just on the same switch so pwm passed that on the way between Manual and FBWA. So again to recap, there is throttle out in ever mode except manual. Tested on 2 entirely different setups. All this was fine in beta 4 and 5. I never used 6, next step was stable.
I am sure this can be easily reproduced. with the attached setup. Only this “special” here is the reverse trusting. Which I know it not used very commonly. But if was in beta for so long and it was fine there, so it has to be something with 06 and stable that broke it.
Obviously red is throttle input, and yellow is servo output.
my apologies, I meant to say that the issue is when RC3_MIN == RC3_TRIM. I see both are 1498 in your log.
This will be fixed in 3.8.1, but meanwhile, if you change RC3_MIN to not equal RC3_TRIM it will fix it.
Thank you for that. Tridge, as I have got you attention on this, can I please ask you for one thing. I am really surprised there is not such feature in the system right now and cannot believe no one has asked for it. Maybe I am looking at the wrong place.
Automatic landing gear control.
As a matter of fact we build mainly mapping UAVs and the UAV are belly landers, however they have a servo powered cover that goes over the lens at landing. I was hoping this will be easy for me to setup to the “gear” channel and then have it automated, to close (release gear) at auto landing. Apart from having to add “do_servo” commands into every single mission (I am so worried that one the customer will forget and the bay will get ripped off at landing), is there now way to automate this, like landing gear deployment? It just makes so much sense.
Or you could make it user defined altitude based, just as it is in the copter. That would be so awesome. And I am guessing will not need much work, just to copy over some code. So I can just set in parameters:
If AGL less than 20m then deploy landing gear (in my case servo would actually close bay doors).
Can you help with this? I am unfortunately not versed with scripting, however I have a feeling this is just a short and simple code, especially with it already being available in copter. I would be happy to test it.
Thank you again Sir.
This was also requested on the facebook page, and I think it is a good idea. I won’t do it for 3.8.1, but we can add it for a release after that.
I’ve added it to the 3.9.0 milestone for plane: