There is also little documentation for PIXRACER, which serial is serial 1? is that the one documented for GPS? that is the one I use but i also tried other serials.
Should i touch SERIAL0_BAUD / SERIAL0_PROTOCOL ? or are they left untouchted.
The reason I ask because it doesn’t seem i’m getting any data, I don’t get a fix to the gps coordinates I put on BCN_LATITUDE BCN_LONGITUDE , So i didn’t even get to the flying part to see if it holds position well.
What should be the setup on the Marvelmind application side?
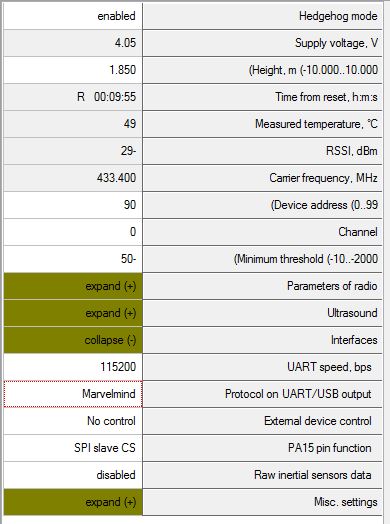
For the hedgehog beacon (the one used for non-gps) I put uart speed 115200 and UART/USB protocol on “Marvelmind” , should it be changed to “NMEA 0183” (i suspect not).
It turns out the GPS port on the Pixracer is serial 3…
I connected to port TL1 / Telem1 / UART2 / Serial 1 (all names of the same port!!)
And now when i try with NMEA i get a “NO FIX” instead of “NO GPS” which might idicate that at least the ports are connected ok.
I also changed the Marvelmind hedgehog PA15 pin function to USART RX,
I connect to UART1 of the marvelmind but i also tried UART2.
Still no success in getting a location fix, (i put my coordinates on the marvelmind program as suggested, and also in the BCN settings
Ok, worked with the Marvelmind online chat and they were very helpful.
Last problems I had were (silly me) you have to freeze the map to get the beacon to send the location info.
and only UART2 on the beacon works (you have to set the PA15 pin function as USART RX)
After that I got a GPS fix as NMEA and then changing back to beacon and I also had a fix
Now I will see how it holds position.
Yes that one is a better thread, just update the post and/or add a new post to the same thread, at some point someone will answer.
Especially if you explain and summarize the stuff that I explained you.
Sitz/Registered Office: Berlin,
Registergericht/Registration Court: Amtsgericht Charlottenburg,
Registernummer/Company Registration Number: HRB 21 280,
Geschäftsführer/Managing Directors: Kurt Blumenröder, Michael Schubert, Kai-Stefan Linnenkohl
Vorsitzender des Aufsichtsrates/Chairman of the Supervisory Board: Prof. Dr. Harald Ludanek
Hello @sevet
How was the performance of Marvelmind? I worked on marvelmind integration for an indoor project but from my experience the system was not reliable for copters…
In the end there were mixed results…
Using as a NMEA GPS, it would sometimes actually work pretty well, as a beacon we never made it work, not even on 3.6RC versions,
There is now a huge howto from marvelmind with very detailed description except one very important step which is how to actually make the orientation, it is detailing everything in full details but that important step is lacking.
That howto uses a custom firmware which i think has the compass disabled and really restrict on the orientation in which you can take of or plug your battery, it also has yaw drifts since the compass is disabled (probably…)