I bought two of these airspeed sensors some time ago. Unfortunately one of them is not recognized on the CAN bus, it just flashes fast and is not recognized as a node by the missionplanner, airspeed sensor and compass are logically not recognized either.
The second sensor works fine on the same flightcontroller (h743 wlite) with identical parameters and connected to the same cable. Therefore I am sure that the error is not due to the parameters or the cable.
Is there any way to reach the device electronically and fix the error or do I have to exchange it ?
I have one product from Qiotek that the CAN transiver chip is not being soldered correctly. so the CAN module communication is totally lost. This is just my case of course. you can actually see yours or attach it here. by the way, I got replacement for free.
Hello, Could you contact the sales@qio-tek.com please, attached pictures or videos, the customer service will contact you to assistance or exchange. @Rolf
The problem is solved. Both devices work. I was simply too stupid to recognize the insufficient power supply via USB (while building and parameterizing a new aircraft) as the source of the error. One of the two devices still works on 4.5 volts of the matek h743 on the USB port of a laptop, the other device mostly does not. This is of course not a Qiotek defect, but mine . With proper power from the battery, both work fine. Thanks @Qiotek and @timtuxworth for the quick support offer.
I’m glad to hear that, the non redundant FCs might some strange issues, they are compatible with firmware, but may not achieve reliability long-running. If the vehicle expensive, I suggest you use redundant flight controller. @Rolf
Matek diagram told you is a I2C airspeed sensor wiring, not a CAN sensor, So you should rewiring with the airspeed sensor CAN port to the FC CAN port. or you can use a CAN splitter to do the connecting.
Due to the Qiotek CAN sensor built-in a CAN periph board like the Matek CAN GPS, So you can’t connect with the Qiotek CAN sensor I2C port to Matek CAN GPS I2C port directly.
Even if they are connected as you said. Because the Matek CAN GPS periph board haven’t the ASP5033 driver on it’s default built, it also can’t detect the Qiotek ASP5033 I2C sensor to works.
So here’s what I have now - FC CAN → Wire → Splitter → 1) GPS (CAN) and Splitter → 2) Qiotek Airspeed (CAN).
Both GPS and Airspeed are blinking slowly blue.
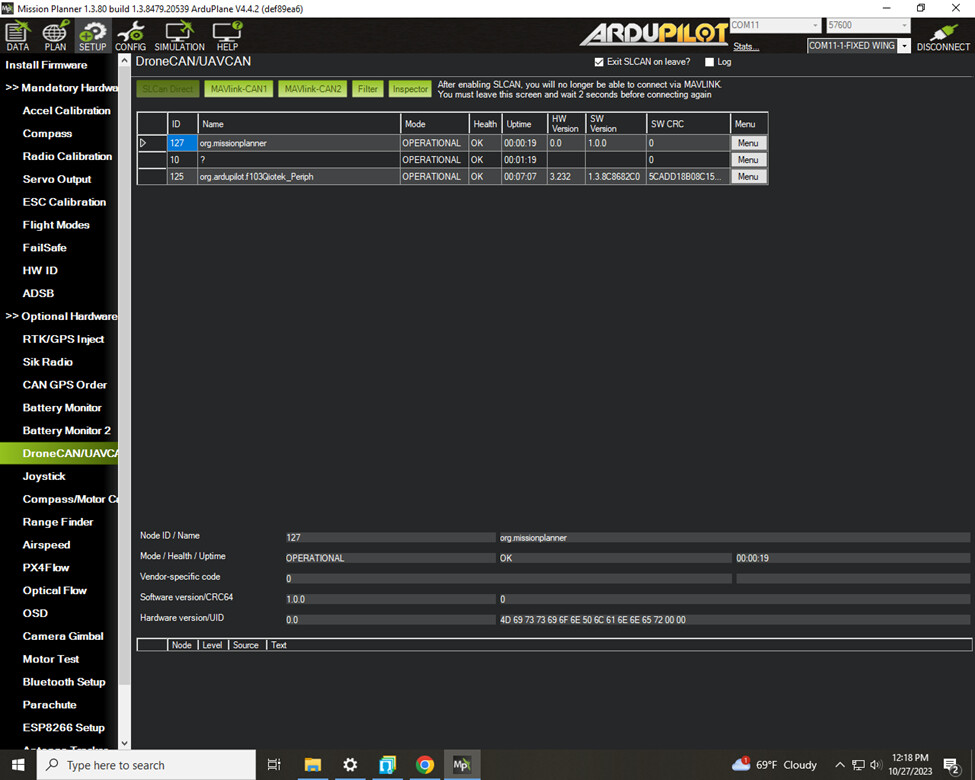
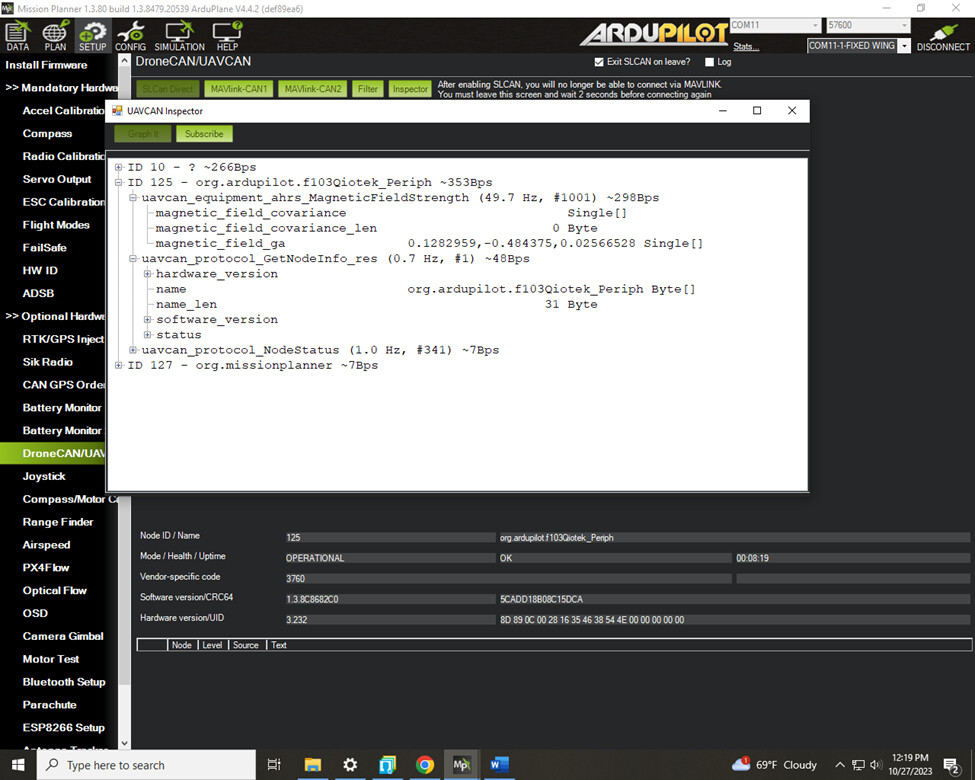
Still can’t see the Airspeed sensor, however. When I go to SLCan interface, I see 4 IDs, but none of them are airspeed. Further, Airspeed does not initialize.
Agreed - I will remove the Matek GPS from the splitter leaving only the Airspeed sensor and then look for the board name ID in the list. I will paste the screen to this message a little later this afternoon ET. @Qiotek
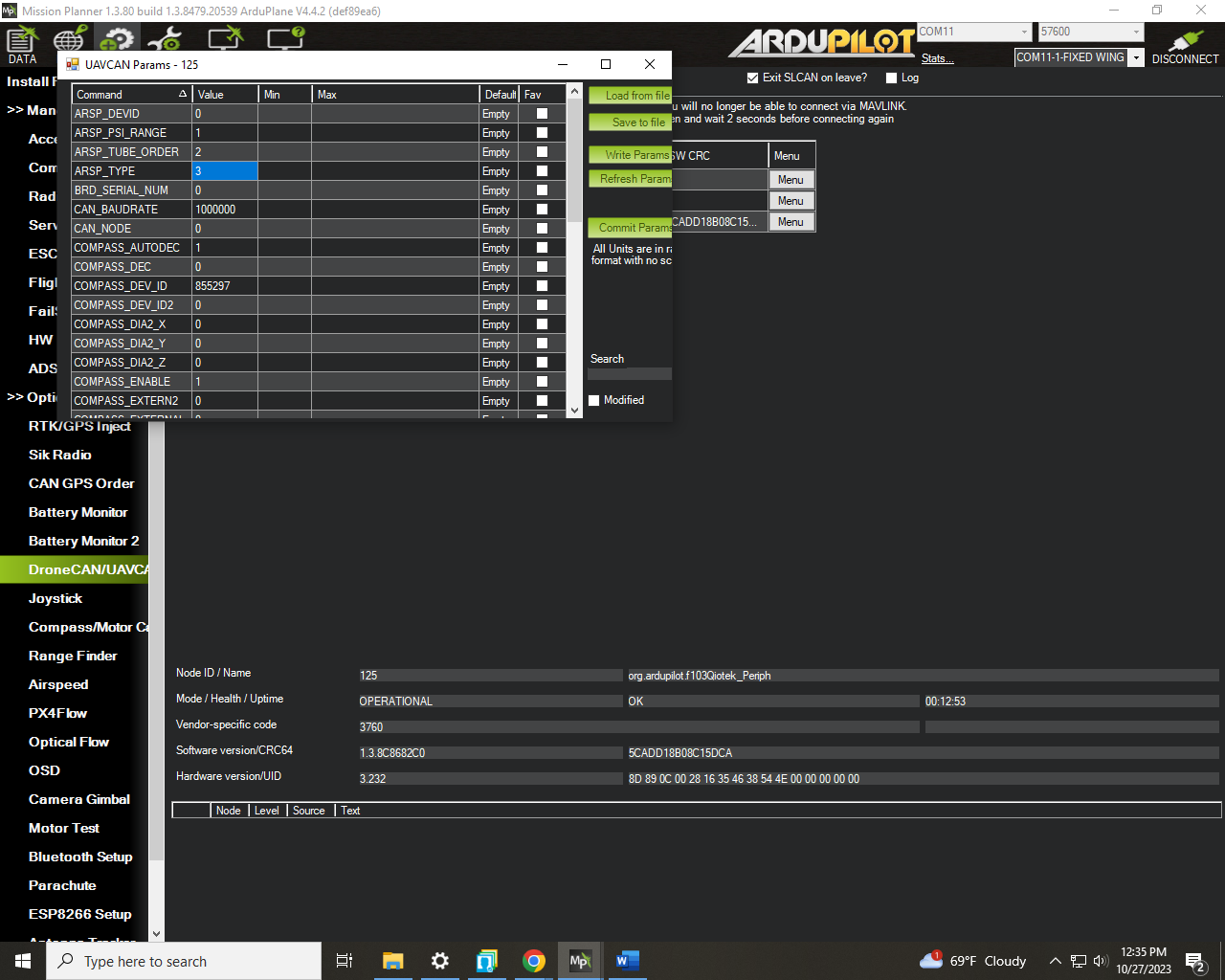
UPDATE - I continue to observe the Error: Airspeed 1 not initialized, cannot cal despite the following settings:
In CAN1 Configuration for the Airspeed sensor I have ARSP_TYPE as 1, 3, 6, 8 and 9. I then reboot the plane and observe the messages in Mission Planner as the FC initializes. Each time, the error show above appears.
Quick update - I had success yesterday with both the GPS and Airspeed sensor. Here’s what I did:
Remove GPS from splitter so that FC and Airspeed sensor are the only devices communicating.
Open Mission Planner and look at MAVLink CAN1 connection. Airspeed sensor is given name (vs. ID with ?).
Click on Menu and select parameters
Set ARSP_TYPE to 15
Save parameter
Remove power from FC (battery) to force a hard restart
Observe airspeed functionality in message, status and main UI of Mission planner.
Reconnect GPS to splitter
Remove power from FC (battery) to force hard restart
Observe GPS functionality
Thank you Jason and team @Qiotek for your help with this. I suspect my issue here has been the ‘soft’ reboot (via compas) vs. ‘hard’ reboot (via power removal).
Usually, users only need to set the ARSP_Type of FC to 15, then restart FC, and can use it normally. The issue you encounter may be caused by setting the default parameters of the AP_periph board you changed. @f4corsair