The first flight was uneventful, just a bit of additional Alt-hold oscilation, however the second flight triggered an EKF failsafe, and by the looks of it all the devices connected via i2c stopped providing data.
On i2c I have connected Optical Flow, Lightware SF11/C, Compass and LED.
(previously, SF11/C was connected via serial, but I wanted to free up the serial port for a 2nd GPS)
I’ve checked the wiring and nothing seems to have come loose.
I’m thinking either I’ve overloaded the 5v supply on the i2c port (although all these devices together use <500mA)… or maybe there’s a problem with running Lightware devices on i2c.
On a separate note, I Optical Flow doesn’t seem to stay enabled after power cycling some times. (I had double checked it was enabled before this flight, but the log shows it was disabled again).
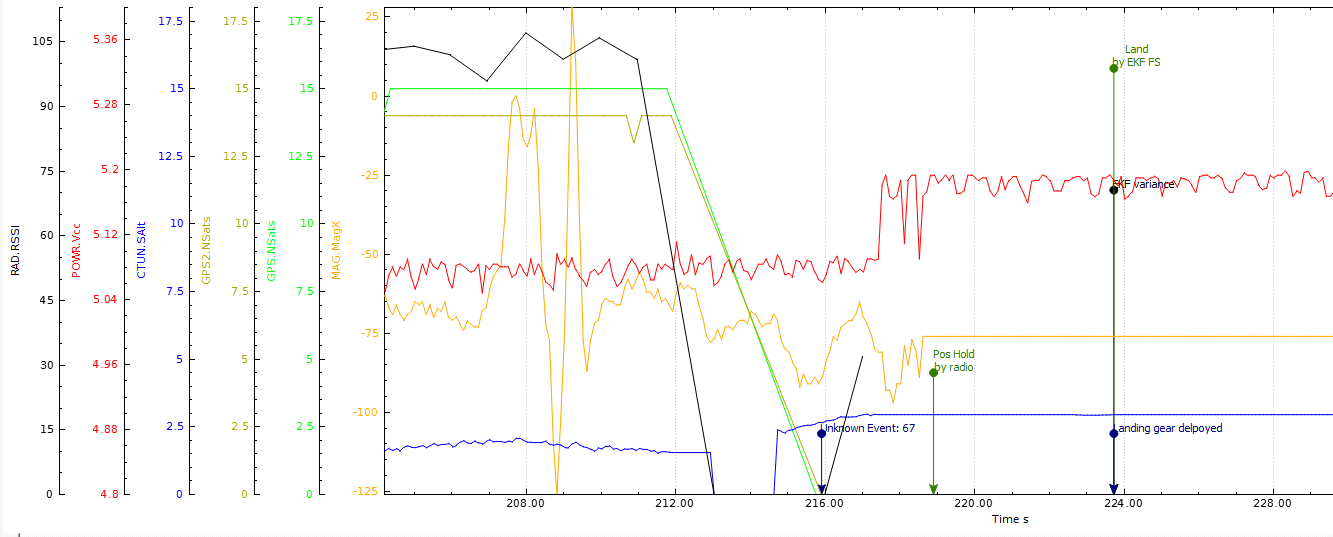
VCC increases by 0.1v at the exact point the i2c devices stop responding. Potentially this caused by the 5v load decreasing as something came disconnected.
An hour of wiggling wires, shaking the frame and ‘general prodding’ won’t recreate the problem, so I’m ruling out this being caused by bad wiring for now. (all connectors were also locked in place with a dab of hot glue)
Observations:
Compass flatlines at the exact point I switch to Poshold (plot RCIN.C5 vs Mag.MagX)
Just prior to this, the rangefinder stops giving readings, then comes back online but seems to get stuck giving readings fluctuating slightly around 2.95m.
It’s a pretty wild guess but my thoughts are that the i2c power was overloaded by the px4flow and rangefinder, causing the rangefinder to reset, which somehow tripped up the compass.
It turns out I had ALL these devices connected to the same supply (‘VDD_5V_PERIPH’ on Pixhawk schematics) which has a 1000mA current limiter.
I’ve rewired now so that the PX4FLOW and SF11/C are powered directly from the servo rail and the 3DR radio is connected to Telem1 (which has a dedicated 1.5A supply).