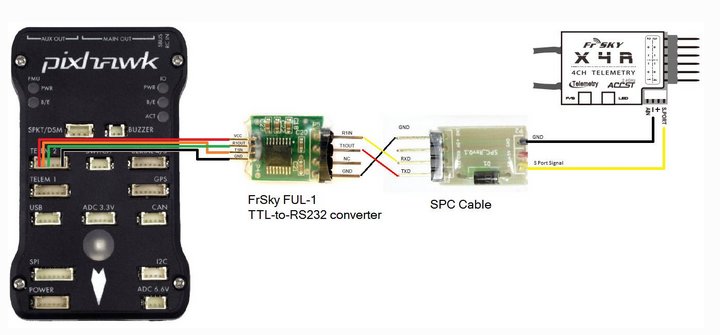
Taranis X9D, X8R receiver, Pixhawk, Rs232 to TTL converter (original from Frsky), Luaplane script on the Taranis.
The telemetry works perfectly until arming the motor , then the telemetry apparently do not receive anymore data from Pixhawk.
I have tested both Telemetry Port 2 and 4 and several arming configurations , but with same result , when the motor is in Arm state the telemetry do not work anymore.
The video is not very clear but changing the flight mode with a rotary switch on the Taranis make the telemetry update the flight mode with also a voice message once armed non more telemetry on the Taranis. When disarmed the telemetry come back.
I have also the 3DR 433mhz telemetry on Telemetry port 1 that works perfectly.
Check your LOG_BITMASK and maybe try with a faster SD card. If too much data is being logged on a slow or corrupt card then CPU usage is too high and the Pixhawk doesn’t have time to reply to the FrSky receiver which causes telemetry data to be lost. Hope this helps.
It make sense , but Log_Bitmask is the default setting and the SD is a pretty fast one.
Will try to disable logs and see if the problem remain.
UPDATE
tomlauzon gave the right suggestion the problem was the SD card, probably a Kingstone 4gb fake, once changed with other quality SD cards the Frsky native telemetry work again even after arming.