hello,
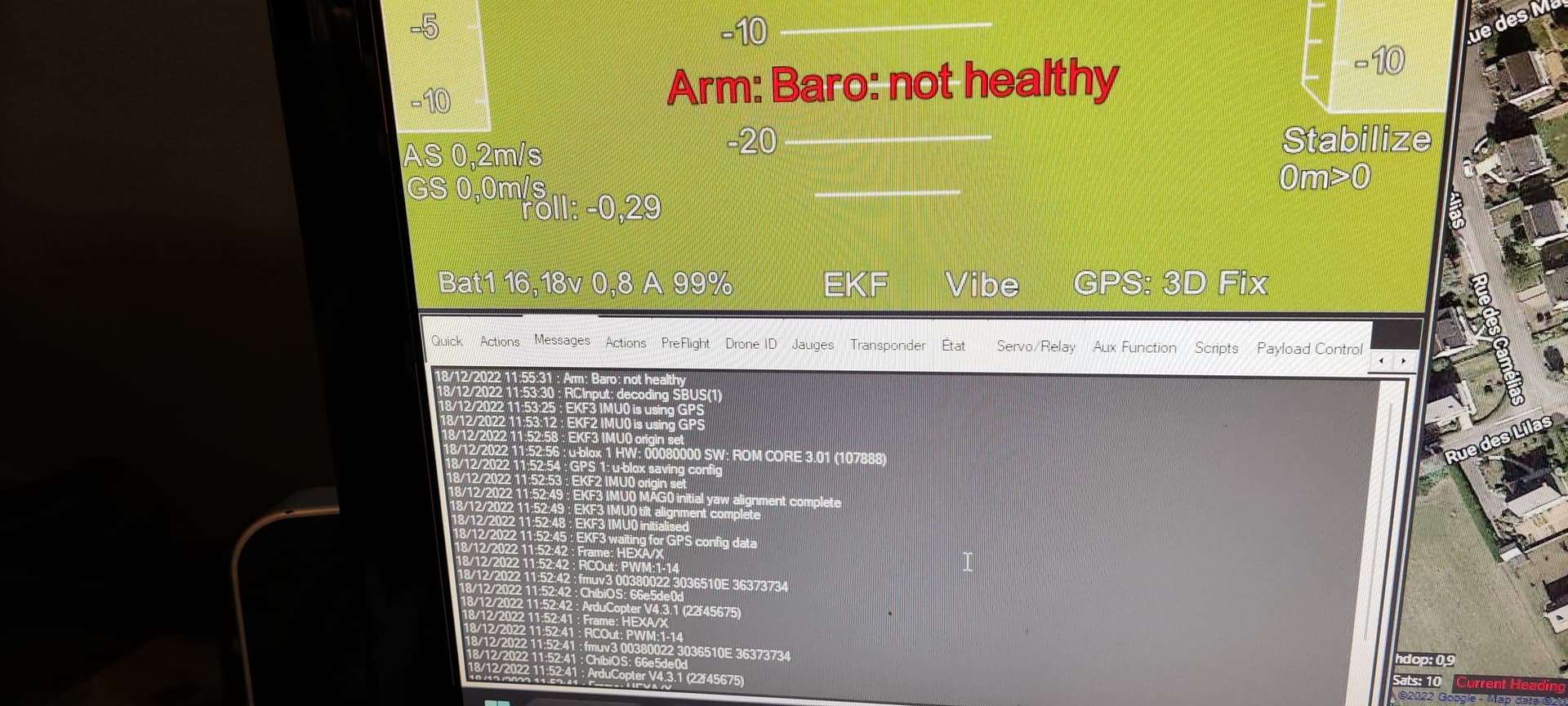
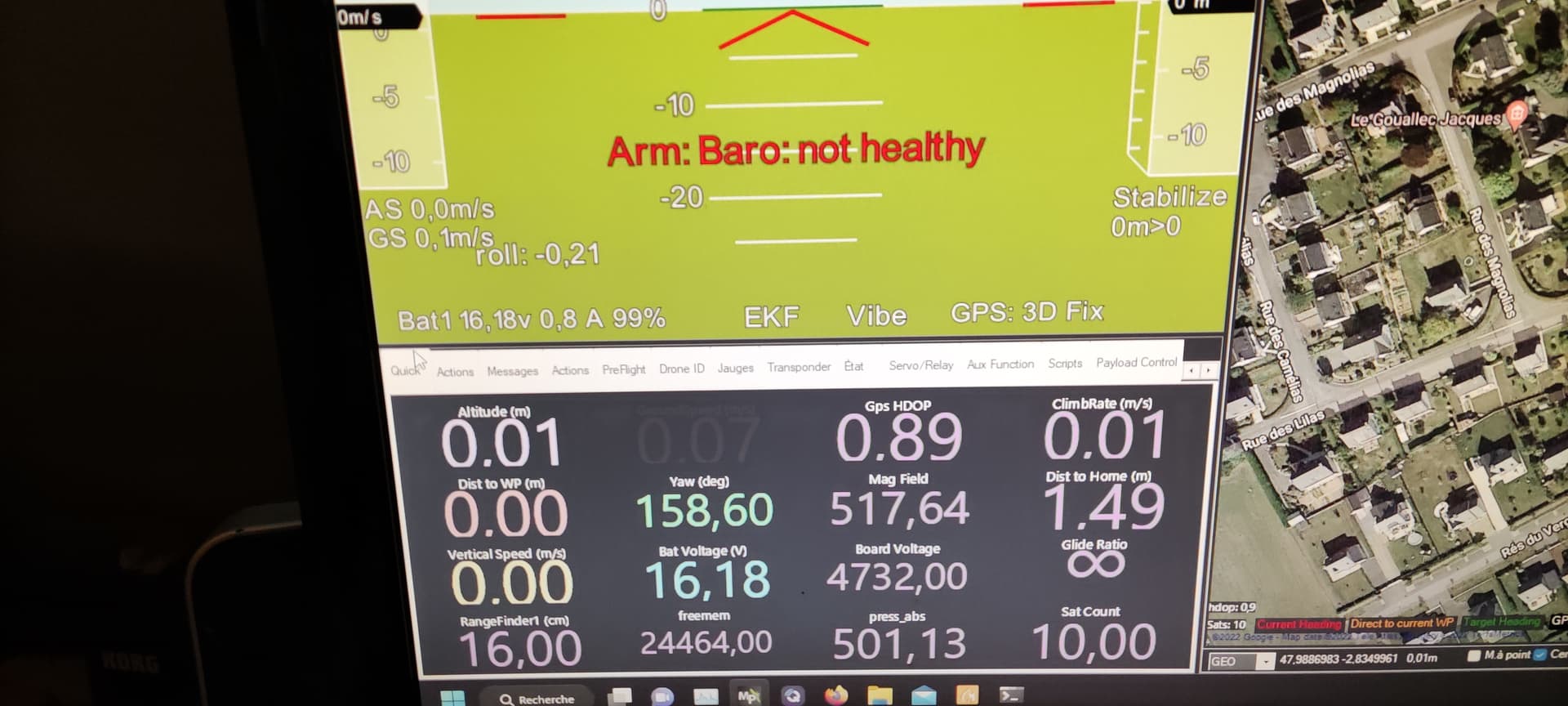
I have a pixhawk 2.4.8, and after an upgrade from arducopter 4.0.0 to 4.3.1, I always have the following error : arm: baro not healthy. Rolling back to v4.0.0. and no more error.
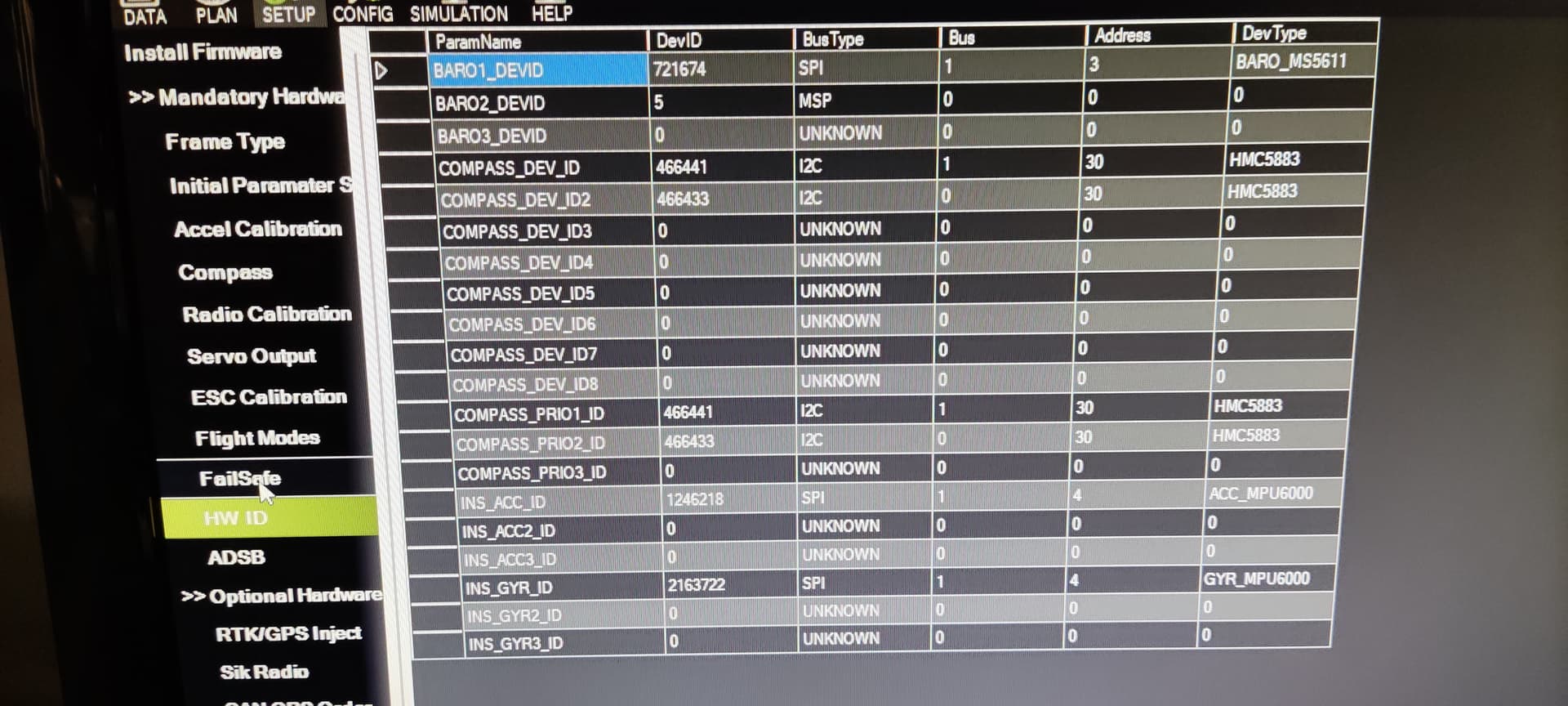
Is there a problem with the baro (MS5611) with the recent versions?
Thanks
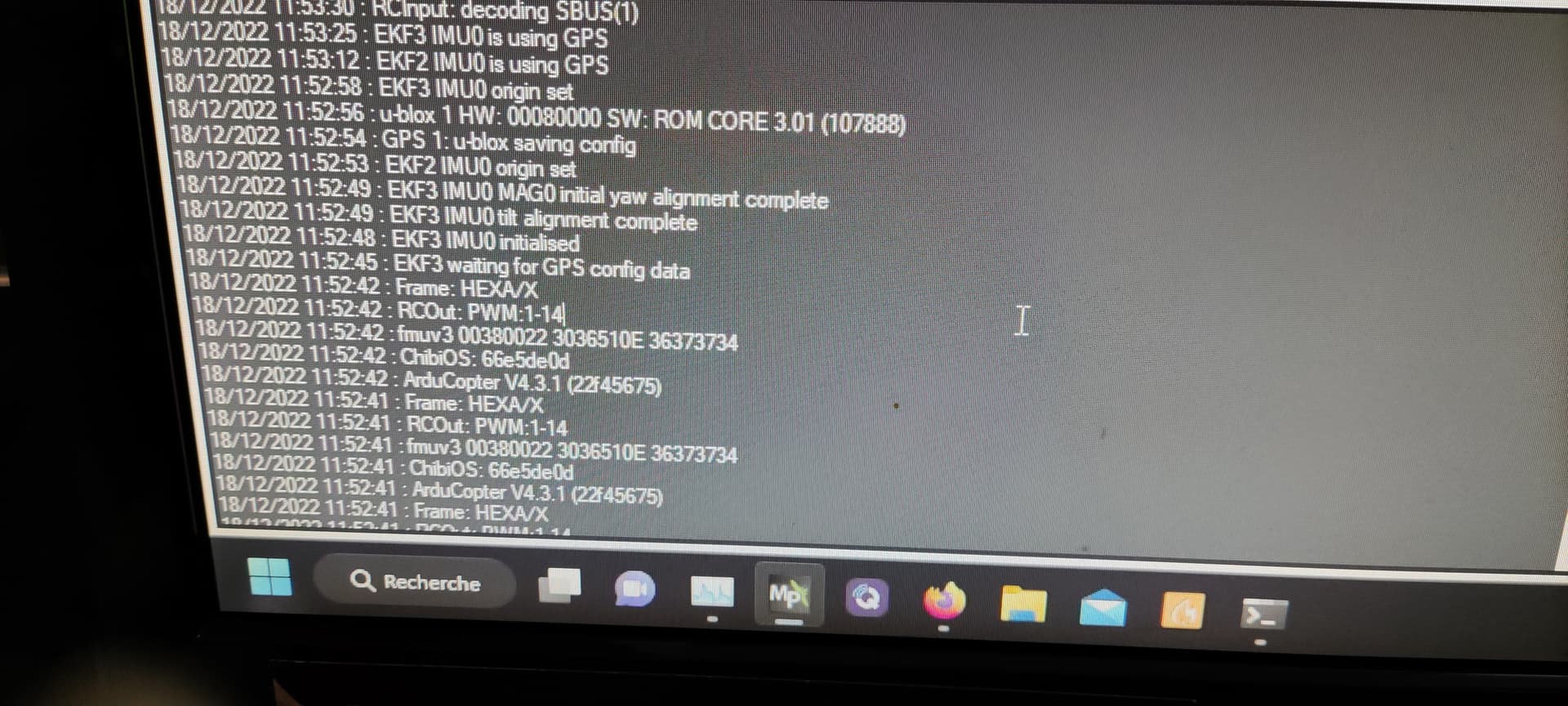
Post a screen shot of Mission Planners message screen after connection.


Good news,
after searching why this could happen, i’ve finally try to enable the baro_option “treat MS5611 as MS5607” and it works, no errors. I’ve ordered a BMP280 for the future, which has better accuracy.
OK, you should be using Pixhawk1 not fmuv3
Why? I always read to use the fmuv3 with this version of pixhawk.
Pixhawk1 is the correct firmware for those 2.4.8’s.
OK, thank you for your advice. I will install and see.

Ok, i understand. I can’t test a flight today because there’s a lot of wind and rain here.