Greetings fellow enthusiasts,
I’m reaching out with a situation concerning my recently assembled Quadrotor. The build was completed using:
- Cube Black
- Here2 GPS
- Hobbywing X8 Power System
- 2x 6S 22000 mAh batteries in series configuration
- An Agricultural Sprayer frame.
Having carefully executed the setup and the preliminary adjustments, the UAV performed well on its inaugural autonomous missions.
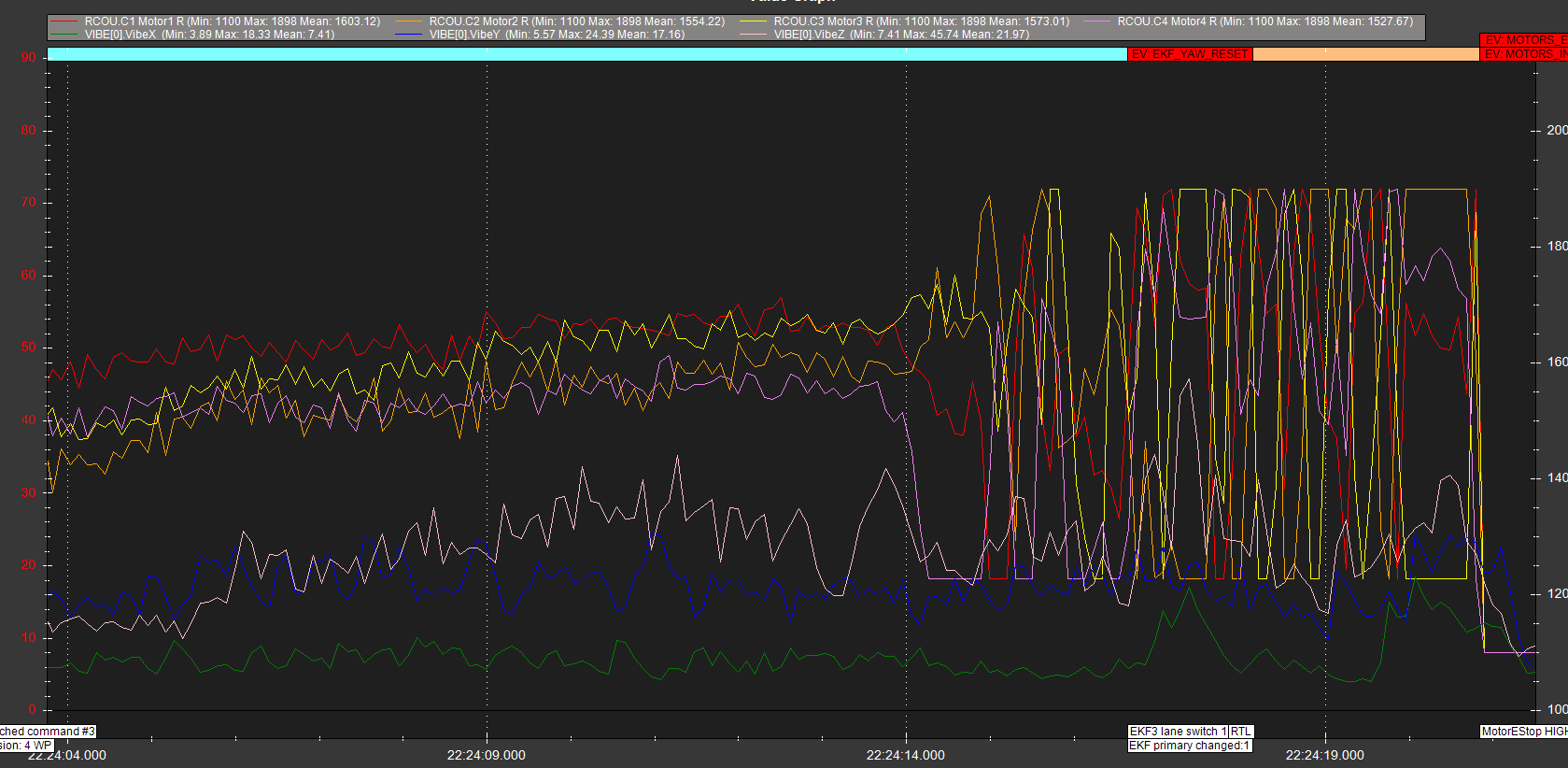
Regrettably, an incident occurred today. After tweaking the WPNAV_SPEED parameter upwards, my quadrotor experienced an abrupt spin and consequently crashed, resulting in total loss of the craft. Thanks to the safety precautions in place – multiple observant spotters with radios ensuring a clear operational area – no personal injuries occurred.
In order to unravel the mystery surrounding this mishap, I could use some help with the analysis of the craft’s log. My primary suspicion is an electronics failure. However, one of my spotters mentioned an unexpected approach of birds towards the craft prior to the crash. While it remains unconfirmed if the craft was hit by a bird, this could also be a plausible cause of the crash.
I’d be incredibly grateful for any assistance you could offer in making sense of the log file to determine the likely cause of the crash.
The crash log can be found here: 00000047.BIN - Google Drive
Now I am off to disassemble the wreck to see if anything of value can be saved ![]()