Thanks for the quick and understandable reply and attention to my questions ! I wanted to know in what sequence to include the modes SOAR_ENABLE_CH and AUTO. Is it possible to first use the mode of SOAR_ENABLE_CH then turn on AUTO or first AUTO then turn SOAR_ENABLE_CH? ? Can I enable this mode SOAR_ENABLE_CH at any time modes AUTO, FBWB or CRUISE?
Yes you can use SOAR_ENABLE_CH with any of those modes with SOAR_ENABLE=1. Or you can leave SOAR_ENABLE_CH set to 0 - in which case soaring is always enabled when SOAR_ENABLE=1.
Hi Sam! Thanks for the reply? Your answer helped to understand how to adjust the mode SOAR. When the weather on the street will be good I’ll do tests and will send report about the results of the mode SOAR
Sam,
I stumbled across this thread and have been planning to try “Ardu-Soar.” Do you think a Volantex Phoenix 2400 would be a good starting point for this? I have no experience with thermaling but was curious about trying it before I saw this. The Radian is now only available as an XL and only has an expensive stabilizer that will be ripped out. It also has a lot of dihedral. Seems a lot less interesting than the Radian Pro which you cannot get any more.
I then looked at the link you supplied to the work on Partially Observable Markov Decision Process (POMDP) by the Microsoft team. What an absolute gem this quiet corner of Ardupilot is – it deserves a lot more attention. I see you are working to port this back to master. When I get more time I am going to try to understand the mathematics of this and fire it up in SITL. This is why I love hanging around Ardupilot. All sorts of amazing things happen on the fringes.
I see that POMDP is optimized ideally for a co-processor and that you are looking at using tables on the SD card to shoehorn this into master. How is that going? Could it be made to run on a Raspberry PiOw? It would be easy enough to slap that on top of an F405 Wing for example.
Hi Marc
I think the Phoenix 2400 would be a good start. I actually had a Phoenix 2000 set up at one point but didn’t get to test soaring on it. The construction is good - very robust. It does like to fly a good bit faster than a Radian.
I was doing quite a bit on the POMDP - you can find my version in a more recent branch from master, and slightly changed for simplicity/readability, here https://github.com/samuelctabor/ardupilot/tree/Soar-POMDP-master .
I got as far as testing it against the vanilla soaring code in SITL. Unfortunately I found that the SITL environment was giving some non-repeatable results, even after disabling all the RNGs I could find. This made it quite hard to thoroughly assess the advantages of the more complex method. I’ll get back to it when I have some time. Computationally it is actually OK on the Pixhawk - the Microsoft team did their flights that way.
Sam
What am I supposed to do? Can it be a bug in the program?
In the program message: SOAR_POLAR_K value is out f range. I have (http://ardupilot.org/plane/docs/soaring.html?highlight=soar) SOAR_POLAR_K = 16X3,5/0,56 = 100 http://ardupilot.org/plane/docs/parameters.html#soar-polar-k-cl-factor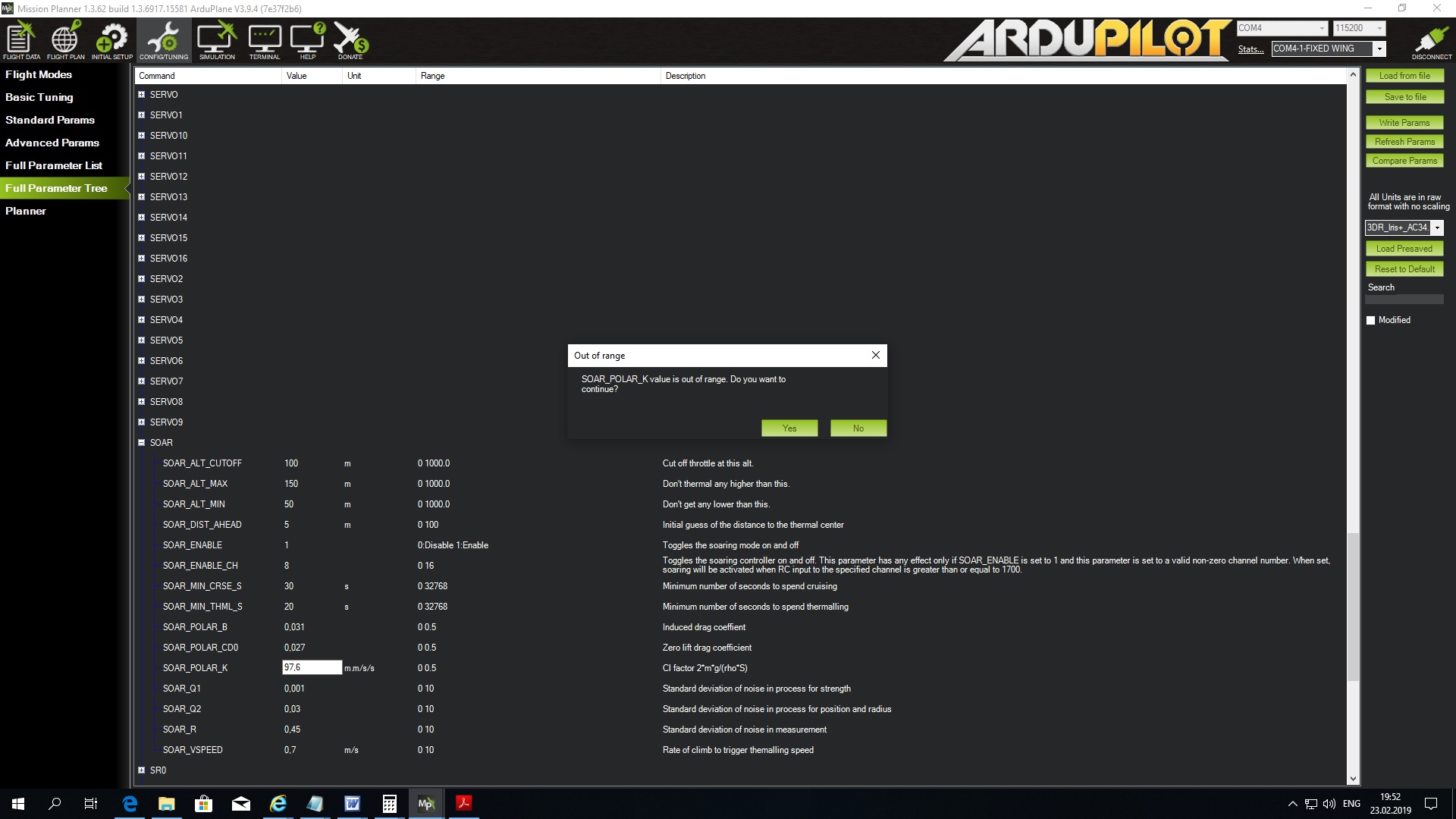
SOAR_POLAR_K: Cl factor
Note: This parameter is for advanced users
Cl factor 2mg/(rho*S)
Range Units
0 - 0.5 square meter per square second
Is it a mistake Range 0-0,5?
For exampleб RSS-2018_Radian_Pro_parameters.param SOAR_POLAR_K,40.1
It’s fine to hit OK. I’ll fix the range of the parameter in the code to avoid this warning in future.
Thanks for the quick reply! I continue to work on this project. Is the value of parameters for a glider with an area of 0.56 square meters and 3,5 kg suitable for use SOAR_POLAR_B,0.031 SOAR_POLAR_CD0,0.027 ? For Radian_Pro is SOAR_POLAR_B,0.033 SOAR_POLAR_CD0,0.042.
Hello, I’m new here and that’s my first post.
I’m using ArduPlane 3.10.0 (04.05.2019) on MATEK-405 wing and my ASW17 from HYPE is flying very well.
Since some weeks I tested the SOARing option, but I’m not really satisfied with the results. If there are thermals, it works fine, but if there are no thermals, it seems, that the plane is falling from one stall to the next.
I had no and I will not install a speed-sensor, because my aim is to equip my existing scale-sailplanes with ArduPlane.
Now my question:
I would like to test the TECS_SYNAIRSPEED option. But the cryptic warning “Do not enable this option unless you fully understand the limitations of a synthetic airspeed estimate” made me unsecure. I understood that that option is resulting in an estimated airspeed only, but that should be better as using no airspeed at all (except the GPS-groundspeed?).
So what’s the risk?
If my plane is in trouble I can fly it MANUAL - so I tend to try out that option.
What do you suggest?
Hi Willy,
Yes soaring will definitely not work without an airspeed sensor as the documentation says. In fact in the next version I am going to check this automatically and turn soaring off in this situation.
I haven’t tested TECS_SYNAIRSPEED but I would expect it to work better than no airspeed sensor at all.
Airspeed sensors are very easy to install and will make your plane fly a lot better and more reliably - highly recommended!
Sam
Hi Sam,
I thank you for your quick feedback.
I will test TECS_SYNAIRSPEED and will report here.
If it works (as a less-than-ideal solution) it would be helpful to let exist the option of SOARing with no airspeed-sensor and give just an additional hint in the documentation.
But first let’s see if it really will work.
The last two days I tested SOARing with using of TECS_SYNCAIRSPEED - and … it’s working 

So that supports my minimalistic concept to equip my bigger scale-sailplanes with just a MATEK-F405-wing, a GPS and a FrSky R-XSR - no compass, no speed-sensor, no SD-card.
@Sam: Would you please let exist the option of SOARing with no airspeed-sensor.
Willy
Hi Willy,
Glad to hear it’s working well! I’ll update the docs to add it as a backup option.
If you feel like experimenting you could try my newest soaring work here
Already tested by Marco and I but not yet in the master branch.
Sam
I look forward to test your last version, Sam. But I have to become familiar with GitHub first, to be able to build a version for my MATEK F404-wing Hardware. For many years my job was software-development, but with GitHub environment I’m not experienced. So I need a rainy weekend first 
Willy
FYI if anyone would like to try the most recent version, I have uploaded binaries here for a few boards.
Sam
I’ve been looking for the variometer-value/vertically-speed in the log-parameters, but I couldn’t find it.
Could anybody give me a hint?
Willy
Hi Willy,
All the vario data is in the VAR log item.
VAR.raw is the instantaneously calculated value, while VAR.filt is smoothed.
A full list of the VAR fields:
- aspd_raw Airspeed straight from the sensor (unused in latest version)
- aspd_filt Airspeed after filtering
- alt Altitude
- roll Roll angle
- raw Unfiltered vertical airspeed estimate
- filt Filtered vertical airspeed estimate
In the new version (not yet in master) there are also:
- cl Raw climb rate
- fc Filtered climb rate
- exs Expected sink rate while thermalling at specified radius
- dsp Current longitudinal acceleration
- dsp_bias Estimated bias of longitudinal acceleration
Not sure I can inquire here. SOAR_ENABLE parameter is missing in AP 4.0. What am I missing?
Thanks in advance
it is removed to save flash on some flight controllers, what are you running?