Hello SonicHousecat, I have had a serious problem, in my ASW 28, and it was left for a lot of repair, for this I have bought a Multiplex Lentus like yours, and I would like if possible, would you tell me how you have mounted the Matek H743, and the GPS. The Pitot I am riding an Analog Matek, in the tail, but I would also like you to tell me, you carry it on the knob.
Thank you and happy flights.
Hi Jose,
I put the controller and GPS on the “1-01463 Fuselage filling piece (landing gear)”:
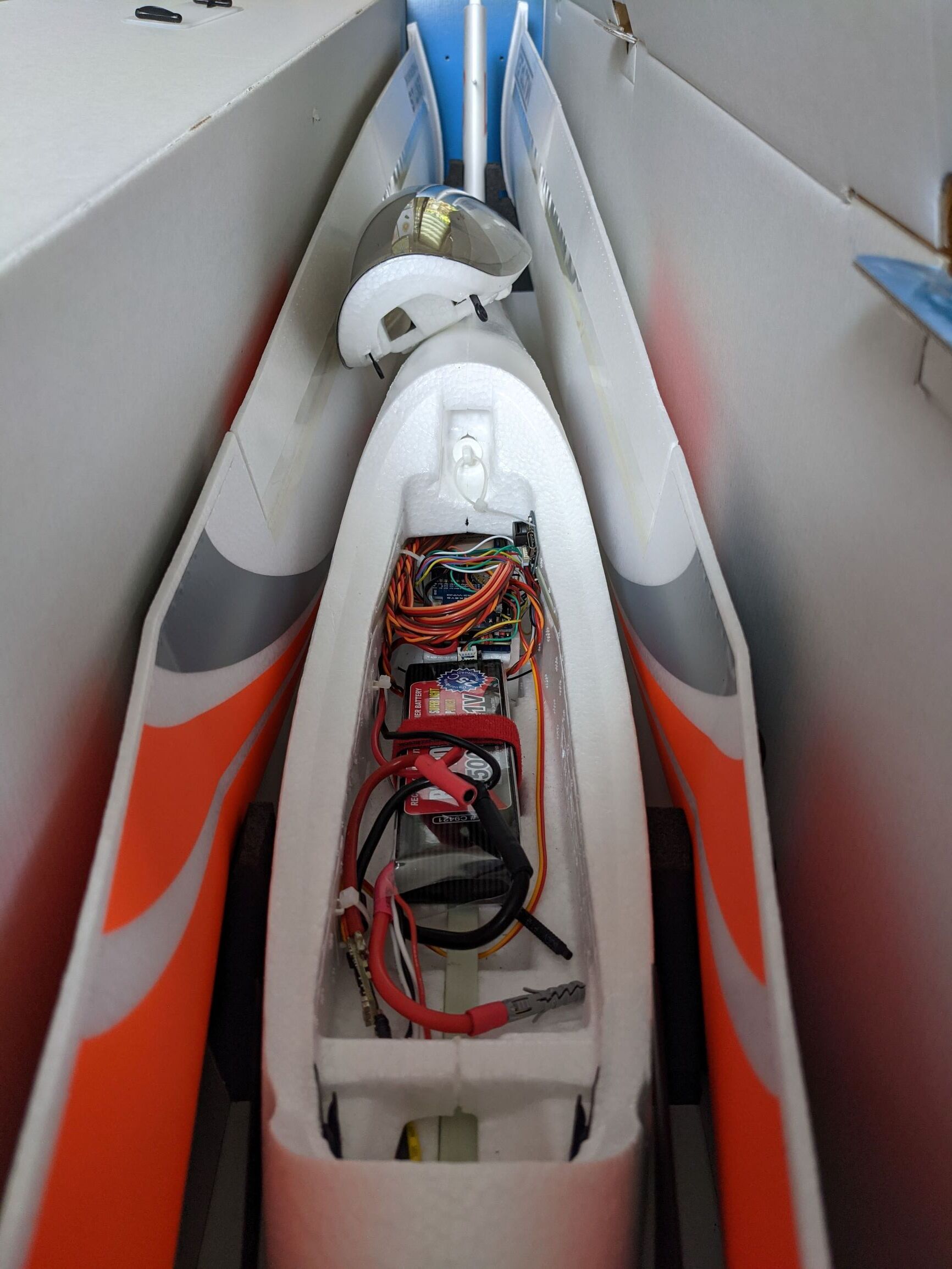
Airspeed sensor SDP33 without housing is in place for the trim weight (ball bearing):

With 2365g, I tried to get close to Multiplex’s weight specification of 2400g, since I assume the wings were designed for that weight.
I use the CG at 67mm as suggested in the instructions.
There are some caveats with my setup.
10.5 m/s (TRIM_ARSPD_CM 1050) is close to stall speed, so stall will definitely occur at 7 m/s (ARSPD_FBW_MIN 7). I still need to find a good combination for STALL_PREVENTION, ARSPD_FBW_MIN and the resulting bank angle limit.
With my DShot issue, I need to do a “Preflight_Reboot_Shutdown” to get the motor running. ESC telemetry is not working most of the time.
I tried FPort but could not get the telemetry to work.
I had an inflight reboot while trying five spline waypoints in an infinite loop (do_jump -1).
If you want to use the original ROXXY ESC, be careful with two BECs.
Translated with www.DeepL.com/Translator (free version)
Hello SonicHousecat, thank you very much for the information and the photos, they are very helpful.
I also thought of mounting on the "1-01463 Fuselage filler piece (landing gear), but in my case I have bought the retractable landing gear, and at the moment I don’t know whether to mount it, due to the overweight it produces of 173 grams. If you can give me an opinion on this.
I have little left to finish the fuselage, and I hope to be flying Soarin very soon.
Thank you and happy flights.
Hi Jose, I’ve seen pictures where they put the receiver on the landing gear.
But I’m not sure if that’s a good idea for a flight controller.
Regarding the little extra weight of landing gear, I would not expect a big impact on the performance.
You will need to fly a bit faster, so the wings can produce the additional lift.
Basti’s Lentus with the 4S3P Li-Ion setup weighs about 3000g and he can fly it surprisingly slow (post 315).
Hello, as I mentioned in a back post, I had a serious problem with my ASW 28, which was quite bad.
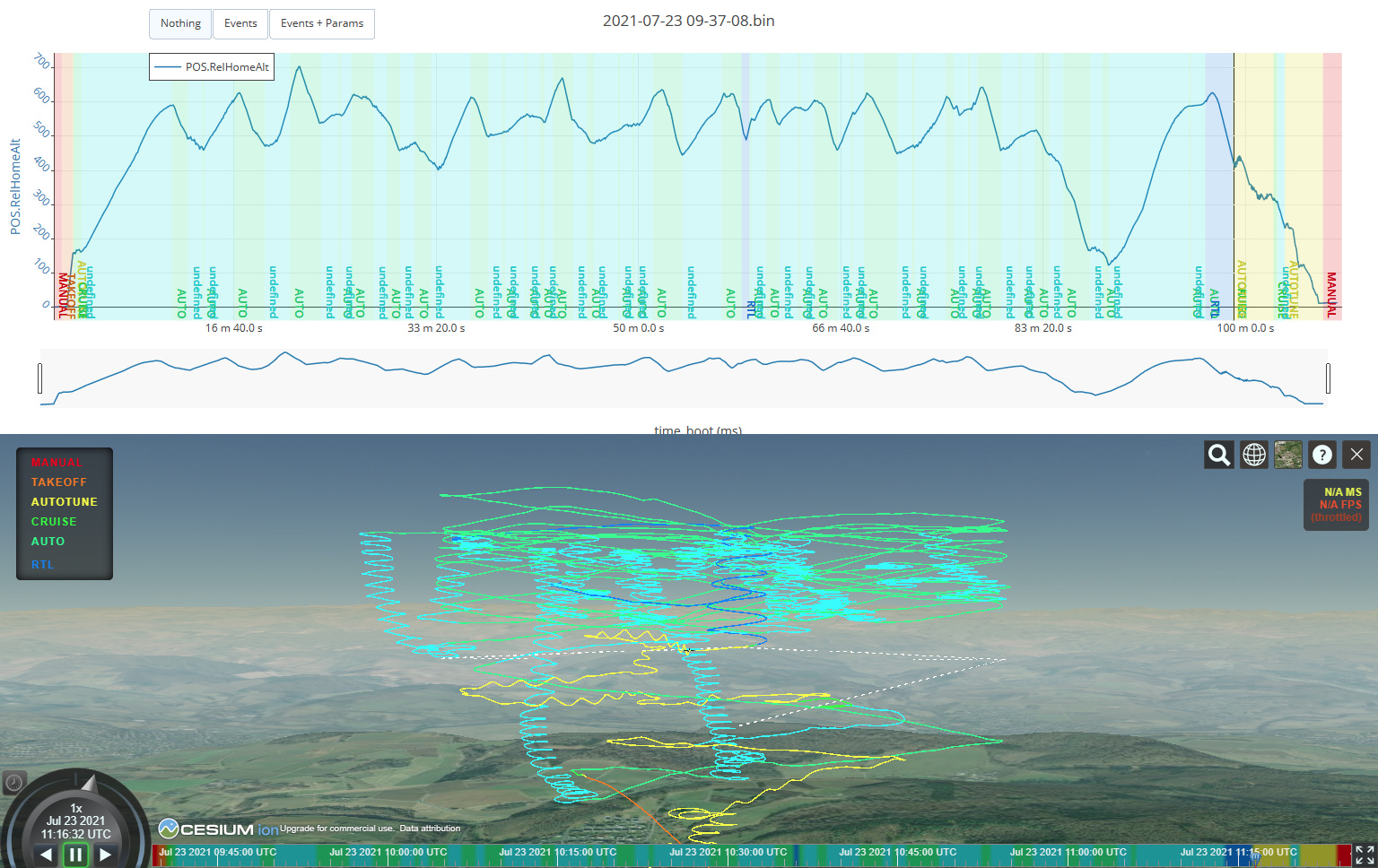
I put a .log file, so that you can analyze the problem.
What I can comment on is that the flight was good all the time, until at one point, the plane went into inverted flight, and no longer went out of inverted until it hit the ground.
In the graphics you can see that the aileron servos go to the end of the travel, and roll 108º, in that position I did not obey the controls, not even doing RTL Mode.
It is as if the IMU is upset.
The controller was an Omnibus F4 Pro, Ardupilot 4.1 Beta.
You will tell me if you find something that justifies this problem.
Thanks.
Sorry, I turned 180 degrees
In case you are interested, to analyze why it was put in reverse flight, this occurred just at the time, which went from manual flight to cruise flight.
Instantly, it went into inverted, sort of like the IMU going crazy, or some Ardupilot problem, at that moment lost control.
All this I communicate, in case you can send this problem, to the Ardupilot developers, to find a solution in 4.1 beta2 or beta 3.
All the best
Hi Jose,
Difficult to tell what’s going on there. It looks like perhaps the problem occurred before you switched into CRUISE mode. You had a large uncommanded roll and by the time you changed mode the aircraft was at -75 deg pitch and 110 deg roll. From there autopilot was asking for full roll rate which seems the correct action. I’d recommend checking the aileron servos; I have replaced mine with DS113MGs because two of the stock servos failed.
Sam
SOAR: WRONG APPROACH BEING USED
I see everyone here working to optimize their planes with precise, complicated parameters to get the last few percent performance out of them in order for SOAR to work. The problem with the SOAR feature is they way it measures and tries to stay centered in lift. So in other words, everyone is concentrating on a little more efficiency to compensate for a SOAR that is not really working. Going to a huge amount of effort to get a few percent of performance rather than just fix the program to stay in lift which would result in HUGE gains is the WRONG APPROACH…
Virtually ANY foam FPV plane can be made to soar, with no need for an airspeed indicator or other complicated parameters being set. See the attached picture, I soar all kinds of FPV planes using ArduPilot FBWA mode all the time, no airspeed indicator, using only vertical speed measured by Ardupilot, and get great results, and I can do this with virtually ANY of my FPV planes. My technique is basically simple math and could very easily be programmed into Ardupilot and work incredibly well… Yet SOAR is not able to stay in and use the same thermals I fly manually 
There is absolutely no reason for it to be like this, other than that Samuel is using the WRONG approach, and wasting all his programming time in solving the wrong problems. The result is a SOAR feature that is very difficult to set up and use, and only works for a handful of people. I just hate to see such a neat potential not being used because the programmer refuses to address the basic task of measuring and staying in thermals.
Here we are, an entire year after I first proposed the easy solutions to this, with a SOAR feature that only works for a few people, and requires unreasonable amount of effort time time to set up.
IT DOES NOT NEED TO BE THIS WAY. If Samuel Tibor is unable / unwilling to address the basic functionality of SOAR, Is there someone else that could work on a soar feature ??? There needs to be some competition here, as it would be easy for a programmer that took the right approach to soaring to make a SOAR version that required only simple, quick setup, and easily outperform what we are stuck with now.

I don’t want to get in the middle of any arguments or step on any toes, but I am slightly interested in soaring algorithms. You said you proposed something a year ago? Is it written up/described in some sort of algorithmic form. In your post it sounds like you the human are able to do better than the current ardupilot algorithm, but it wasn’t clear if you have a better algorithm to propose, or just were commenting that you are able to do better when manually flying the aircraft?
You mentioned that it was just simple maths but you failed to give any details on what this simple maths is.
Some details would be nice to get a programmer who reads this a clue to the direction to take.
What, in your view, is the right approach?
I have given many specific details and suggestions, complete with pictures for the past year… I will be happy to give the details again to anyone that is working on this.
There comes a time at which the community needs to realize that the programmer is taking the WRONG APPORACH, and not achieving a simple goal. Over a YEAR wasted, and we see Samuel doubling down on failure and putting even more time and work and time into failed solutions while ignoring the simple solution that will result in huge gains.
-
Samuel is ignoring the primary and BASIC task of keeping the plane in the thermal. This is where the HUGE, game changing gains are to be made.
-
Further increasing the efficiency of the plane is NOT what is needed, this will only result in a few percent increase at best. I see huge amounts of programming time and effort being wasted on something that will make very little difference in performance of this feature. Virtually all effort is being put into flying the plane few percent better while SOAR exits very good thermals. Basically, Samuel is ignoring huge altitude gains that could be made by simply staying in a thermal and putting huge amounts of time into getting a slightly better sink rate. Personally I would rather see my plane climbing rather than sinking more slowly…
-
Samuel has concentrated so much on the efficiency of the plane and the way it is flown that the setup is a nightmare, overly complicated, and assured that this feature will be used by almost no one. It does not need to be this way… The SOAR feature is easy, and could be something that virtually anyone could set up and quickly use. I have told him exactly how to do it over the past year.
This is not personal, but there is a time when you have to realize that someone is NOT accomplishing a goal, and that someone else needs to work on the task. The SOAR feature should be working very well by now, with simple setup, and useable by almost anyone. I am not familiar with how the ArduPilot team assigns these tasks, but does anyone here know where else I could make this suggestion ??? The entire community should not be denied a working, useable SOAR feature because of the failure of one programmer.
Would appreciate some links to the details and suggestions you have given in the past year.
I was unaware of any alternative views on this Ardupilot mode, and I am sure others would like to see your ideas put forward in a definitive post of your approach.
This thread is now so long it would probably be a better approach to condense your thoughts into a new thread.
Took quite a while to sift through to read your previous posts.
Hi Michael,
In your last post here you said it was working well for you, what changed? You are obviously frustrated now and I’m sorry about that.
Please understand that centring a thermal is not being ignored. Many users are using the thermal centring function successfully including hobbyists, commercial companies and research teams. I have worked to incorporate their suggestions and improvements over a number of years and I am more than willing to spend my time doing the same with you.
However, to do this, I need you to do something for me. Get the SD card log from a flight and point me at an example of the problem you describe. Then we can start to make some progress. I’ve asked you to do this several times now. A screenshot of an FPV feed isn’t enough information.
If you don’t know how to post a log file I can help you there too. But please don’t ask me to change the whole approach again if you’re not willing to accept my help with what’s currently available and tested.
Happy soaring,
Sam
Hello everybody.
I am not saying that Soaring does not work, on the contrary, it has worked for me and I see that it works, but that does not mean that it is the optimal method, I simply cannot compare with anything, only with myself flying with and without Soaring.
I have squeezed the coconut, to understand with my principles and ways, what the Pitot does, to focus on thermal, and the truth is that it is quite screwed to understand.
I arrived with the Soaring, quite started, and I started reading from the beginning, to draw conclusions, but really few conclusions I could draw, because nowhere is it explained what is the principle on which it is based, to focus on thermal. But of course I always draw the wrong conclusion, that it does not explain it because it is not necessary, and I am the one who does not understand.
I do not know very well what the algorithm does, I do not have knowledge of coding to understand it, but I understand that it is not enough to get into a thermal and let yourself go up, and that the pitot seeks greater efficiency, and that, science, not intuition, machines they do not know intuition, we can give them a role model, and train the role model, so that it learns to develop its role, as efficiently as possible without human help, and even better. The soaring on Ardupilot is probably right now, part of a scientific research project.
I asked myself from the beginning, what was the function of the Pitot, in Soaring, and within my limitations and only as a deduction by reverse engineering technique, I deduce that it is the Pitot, and the changes it detects in speed, which it uses. Or maybe you can use the Soaring algorithm of Thermal centering.
Ardupilot has tools to detect the direction from which the prevailing wind is coming, this is used to orient the aircraft against the wind, and it does so through Pitot and the Weathervaning feature, through the Q_WVANE_GAIN command, but of course this belongs to a Q parameter setting, used in VTOL, and I don’t see how to use it in SOARING.
The point is, if you don’t use SOARING, you might as well use it.
The foundation consists, in flying as close as possible, to a glide with the least loss of height per second, in a straight line the Pitot marks the speed, Ardupilot looks for the best translation speed, for the lowest vertical speed.
When entering a thermal, it finds a component of vertical ascending wind, which will add the translation speed, of these two components of translational and ascending wind, a resultant comes out that the Pitot detects as an increase in speed.
The Weathervaning system and the Q_WVANE_GAIN Parameter, which seeks the heading, of maximum wind speed, in front of the aircraft, sets the heading, where it obtains the highest airspeed.
The result is that the higher aerodynamic speed corresponds to the higher lift.
On the other hand, the higher aerodynamic speed, without using the engine, necessarily and in flat flight, corresponds to a gain in height. This is just pure aerodynamics.
The funny thing is that in Soaring, this magical parameter, which looks for the course facing the wind, and that we appreciate so much in the Vtol, here in Soaring they don’t even name it.
I have studied the .logs of my flights as much as I can understand, and I see that the speed control has been switched to the Pits, that is to say that with the Pits, Ardupilot controls the speed target marked as ARSPD_FBW_MIN.
Here in Soaring as a pure Glider, there is no motor, therefore it can only act with the Pits, and maintain a downward flight at a speed given by the ARSPD_FBW_MIN.
When entering an ascending component zone, through the Thermal, Ardupilot tries to maintain the same speed of ARSPD_FBW_MIN, for which, and as the speed has increased, it pulls Pits, to raise the nose, and continue to maintain the speed.
But there is a change in the equation, a substantial change.
Now we have an upward component, due to the Thermal, and we maintain the same speed, and with the nose raised, the plane changes to an upward trajectory, gaining altitude.
It is something like if at that moment, we had a little engine, to be able to ascend.
La Termica behaves with the plane, as if it were an engine.
Conclution:
I don’t know how the thermal centering algorithm works, I don’t even know if there is such an algorithm, but I know that there are other possible methods, if it is not this one that I have exposed, there will be others.
The point is that it works as well as possible, and we are all working on that with enthusiasm.
I always thought that this Ardupilot is teamwork, and a team of friends and with good relationships.
We, my fellow fans and I, have a motto which is: Sharing We Advance.
Thanks for sharing.
" The point is that it works as well as possible, and we are all working on that with enthusiasm.strong text "
The SOAR feature does NOT work was well as possible, not even close. I can manually soar any plane and outperform ArduPilot by a HUGE amount in FBWA mode and using only the vertical speed readout of ArduPilot. LOGICAL CONCLUSIONS:
-
Ardupilot is flying the plane the entire time, no airspeed, or complicated setup needed. Simple pitch and bank control.
-
The SOAR feature is just not staying in thermals like it should. All I am doing is keeping the plane in the thermal.
Basti, You are concentrating on being friendly and nice, rather than having a working SOAR feature. I do not know any of these people, I do not dislike anyone, but the difference with me is that I am willing to say things as they are, and be a bit harsh when needed. I am just trying to wake everyone up, and get everyone back on the right track to make this feature SUCCESSFUL !!! It is SO SIMPLE, but the developer continues to work on the wrong solutions
Hi Samuel,
I do not like to be harsh, but I just do not know what else to do to get you or someone to try a few simple programming solutions. The worst part is that you are putting so much work into the wrong solution while ignoring simple, easy solution that would change everything !!! I know you asked for .bin files, but I do not have SD cards in my planes so .bin files do not exist. What I can do is give you simple solutions that would make SOAR works for everyone. We actually have the same goal, I want you to be successful and want SOAR to work.
I have no desire to brag, I do not post my flights anywhere, but testing and success is obviously important if you are going to put time and effort into implementing my suggestions. I have done soaring flights that most people would only dream about, 5 + hour flights, cross country flights, with virtually any glider are easy, only using FBWA mode and the VERTICAL SPEED readout of ArduPilot, outperforming SOAR by a huge, giant amount. My planes do not an airspeed sensor or anything else. This should tell you:
- All you have to do in SOAR is to keep the plane in the thermal better !!!
- Pitch and bank control are all that is needed, no airspeed, none of the complicated settings you are now using. Give us a simple option that everyone can quickly set up and use.
YES, you did make a lot of progress over the past year, mostly because you implemented one of my first suggestions which was the BANK setting. This improved things a lot, but you still need to implement a couple other things…
- Give us an option to skip all the complicated setup in soar, and just set PITCH and BANK when in THML mode…
- Give us an option that makes SOAR only use the vertical speed measurement to center in a thermal. Have this option IGNORE everything else you have put into the system, simply measure and use Vertical speed and center in the thermal.
- Planes change pitch when banking and also when flying in turbulence, ArduPilot does not keep the pitch perfect all the time, so the vertical speed needs to be corrected for the measured pitch of the plane at any moment. A very simple feature.
- Ignore GPS, windspeed, etc… ONLY use bank angles and vertical speed measurements to stay centered in thermals.
I am not asking for you to throw away years worth of work based on my opinion, what I am asking you is to program what I suggest as a SEPERATE OPTION in SOAR, let the users try it and see how it works out. You will find it works far better than what you are doing now…

Hi Michael, let me tell you that my intention is not to be nice to Tabor, I simply try to understand everyone’s positions, and I suppose that everyone, even Tabor, tries to do things, as he thinks best and knows how to do.
I also think that you yourself try to make Tabor see that there are other ways, perhaps easier, to obtain better results, and I also think that perhaps Tabor’s technique is very complex for most amateurs, not professionals.
The fact is that I tell what happened to me personally, before using the ARSPD through Pitot, and after installing and using it.
Based only on my experience, I assure you that I noticed a brutal difference, in favor of using Pitot.
In principle use the Synthetic ARSPD, IT DOES NOT WORK, of course, for whatever reason, this does not work, probably because of the speed of calculation, but the result is totally negative.
On the contrary, I repeat that the ARSPD Pitot, if it works and if there is a Thermal in minimal conditions, SOARING uses it and ascends, that is something that I do not need to be told, I have seen it myself.
How does he do it? I don’t know, I just suppose, and I would like very much, for Tabor to tell and share it, and explain to us how he manages to stay inside the thermal.
Michael, at no time have I read about you, that you have installed and tested SOARING, with ARSPD Pitot, I have not read everything anyway.
But I would like you to clarify this for me, and if you try it with Pitot, tell us what experience you get, and if you still consider that Soaring is a total waste of time for you.
Thanks and best regards.
Michael,
You may be onto something about the approach required but at very least you will need to start using and collecting logs otherwise how could you ever give the kind of feedback a developer would need to see. Also, you should probably at least try an airpseed sensor. You really do have to realize that developers – any developer – will want to see this data.
Even if you want to show people your manual FBWA triumphs a log will be the best way to make your case.
Hi Michael, the picture of the 334 minutes flight is really impressive. If I want to beat that, I would have to find a more lasting battery for my Horus X12S.
In my experience, Sam’s algorithm centers the thermals very well, if you have the correct polar configured.
My Lentus, nearly always hits the configured upper soaring limit of 600m.
Just yesterday, I had two climbs of over 400m at a time (first and last climb):
I can only offer you to try my approach to determine the polar with Matlab and be the one to proof that an airspeed sensor is not needed for soaring… 
You (and anyone who wants to try it) will need:
- a 30-day Matlab trial with the Curve Fitting Toolbox (optional the Statistics Toolbox for a bivariate histogram plot)
- Georacer’s ardupilog to import the bin file into Matlab -> https://github.com/Georacer/ardupilog
- The Matlab script (Keep in Mind, that I’m not a developer…) -> PolarCoefficientEstimation.zip (6.7 KB)
- A logfile of a flight without thermals -> Example Log File
Let’s start with the needed logfile: it simply needs to contain the sink rate of a glide at different speeds and bank angles in calm, not rising air.
For that, your plane should be well tuned and capable to fly well in auto mode or at least cruse mode.
Here is the example of such a flight:
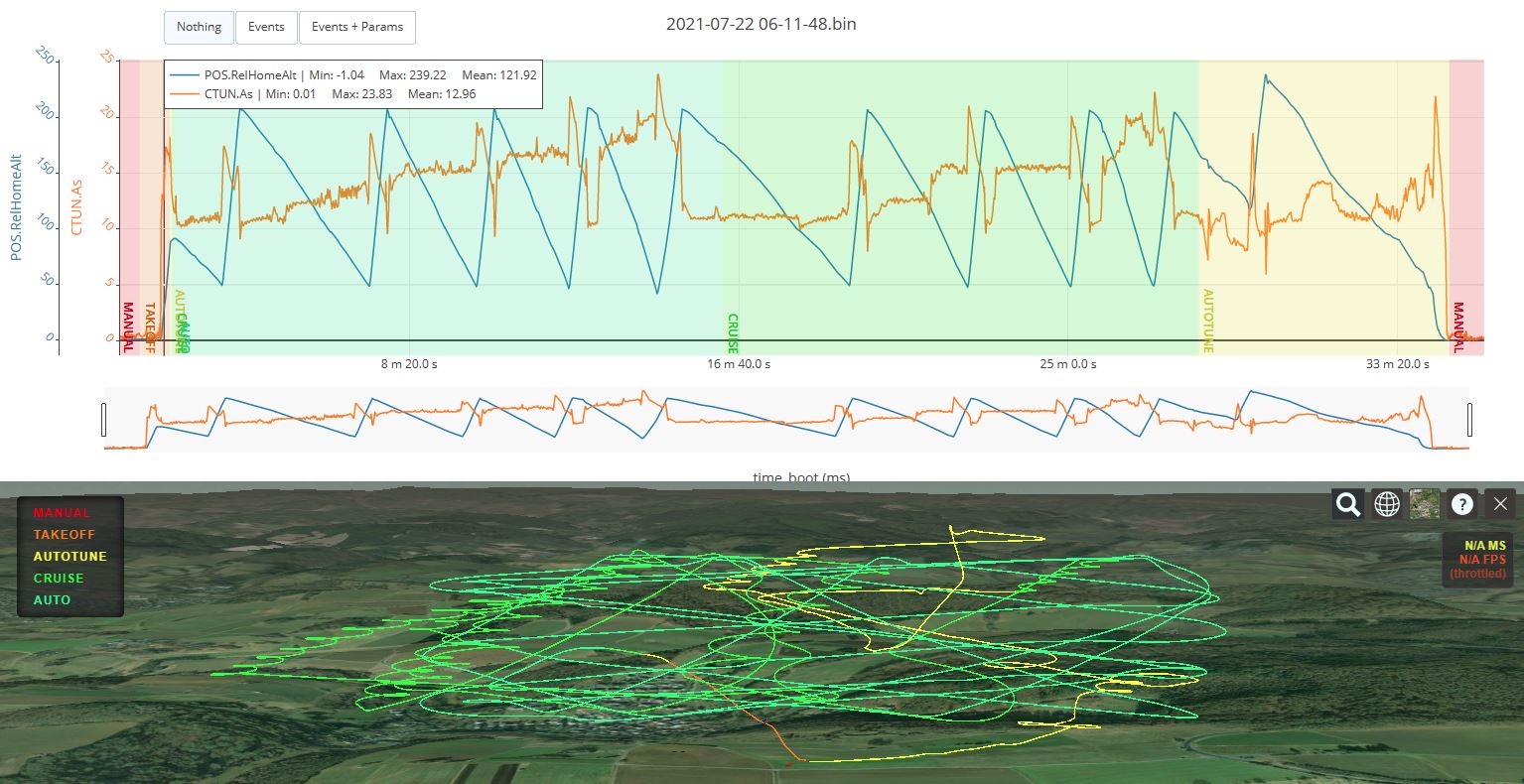
I did the flight early in the morning to ensure there wont be any thermals and only a little wind. The first half was in Auto mode between two waypoints at different speeds. Second half was in Cruse mode circling at different bank angles and speeds. I used the soaring function to automatically climb to 200m with motor and glide down to 50m again and again.
If you got the logfile, than you should get a Matlab trial with Curve Fitting Toolbox and the Statistics Toolbox from https://www.mathworks.com.
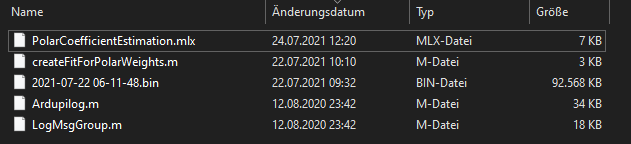
Copy the following files together in a directory:
PolarCoefficientEstimation.mlx & createFitForPolarWeights.m (the script)
your bin-logfile (You can use mine to check you setup)
Ardupilog.m & LogMsgGroup.m (https://github.com/Georacer/ardupilog)
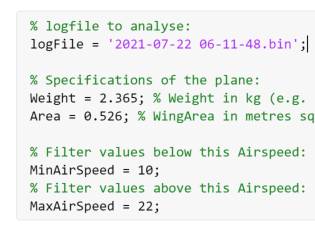
Open the PolarCoefficientEstimation.mlx in Matlab, modify the logfile to the name of your log, enter weight and wing area of the plane, adjust MinAirSpeed and MaxAirSpeed:
Hit “Run” (F5)
If all goes well, it calculates the Coefficients:
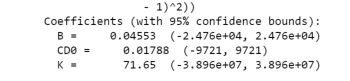
Enter the values B, CD0 and K as SOAR_POLAR_B, SOAR_POLAR_CD0 and SOAR_POLAR_K in your config.