I am referring to the condition of directly entering Thermal Mode as Flight Mode, without the need for anything else.
When it is necessary, use the Ardupilot Thermal Mode ?, or if it is necessary or not, and what advantages can it offer.
1 Like
Either THERMAL mode starts automatically when lift is detected in AUTO, CRUISE or FBWB mode, or you use the flight mode switch or GCS to set THERMAL mode like any other flight mode. There’s no difference once you’re in THERMAL flight mode.
Ok, I understand, now we just need to fly again and try.
On the last day of flight, he did not have the synthetic speed mode activated, the next day I will try it too.
Thanks for everything, we move on with Soaring.
I’m confused about SOAR_POLAR_K. The soaring guide in Arduplane says:
SOAR_POLAR_K = 16Weight/Area (weight in kg, area in metres squared).
but the Parameter list for 4.0.9 and QGC both say:
SOAR_POLAR_K: Cl factor
Cl factor 2mg/(rhoS) (Range 0.0-0.5)
Where is the disconnect here?
Hi Roger,
The descriptions are consistent even though they are different (2*g/rho = 16 approximately). The QGC and Mission Planner descriptions are pulled from the parameter data in the source code, whereas the wiki is written separately.
Sam
Thanks for replying Sam,
I tried using both equations: 16Weight/Area (weight in kg, area in metres squared) and 703Weight/Area (weight in oz, area in inches squared). Both equations came up with the same value (as expected) of 70.2 . Unfortunately QGC limits the input to values between 0.0-0.5. I tried saving the parameter file, changing the value and reloading the file. QGC choked when it got to SOAR_POLAR_K.
Do you have any suggestions?
I see - yes the parameter range was fixed relatively recently so may not have made it into QGC yet. I think QGC will still allow you to enter values outside the range by accepting the warning?
Hi Sam,
I was so curious about the soaring feature in Ardupilot that I bought a foam glider just to try it out and see what is possible.
Tried the default soar polar settings CD0 and B with my Lentus and was able to fly ~80 minutes in good thermals with ~50% battery left.
Log: https://1drv.ms/u/s!Aii1zfYqI1ZijdgYLOzsKX0ncHugUg?e=aOdUIK
But I had the impression that the controller gave up pretty fast to follow the weaker thermals and I could manually follow the thermals a bit better.
So I changed the parameters a bit:
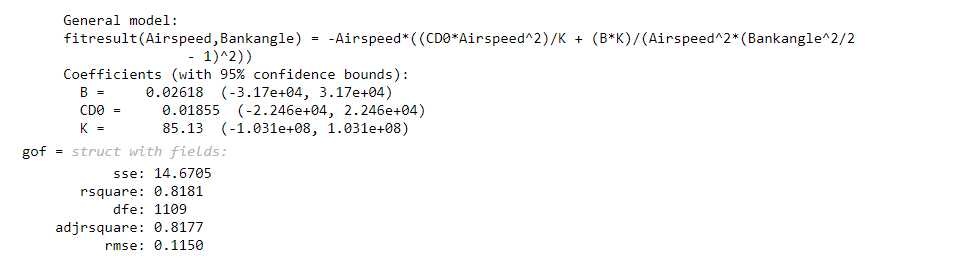
SOAR_POLAR_K 71.94 to 85.13
SOAR_POLAR_CD0 0.027 to 0.01855
SOAR_POLAR_B 0.031 to 0.02618
SOAR_MIN_THML_S 30 to 60
SOAR_THML_BANK 35 to 40
WP_LOITER_RAD 16 to 14
This changed the polar a bit:
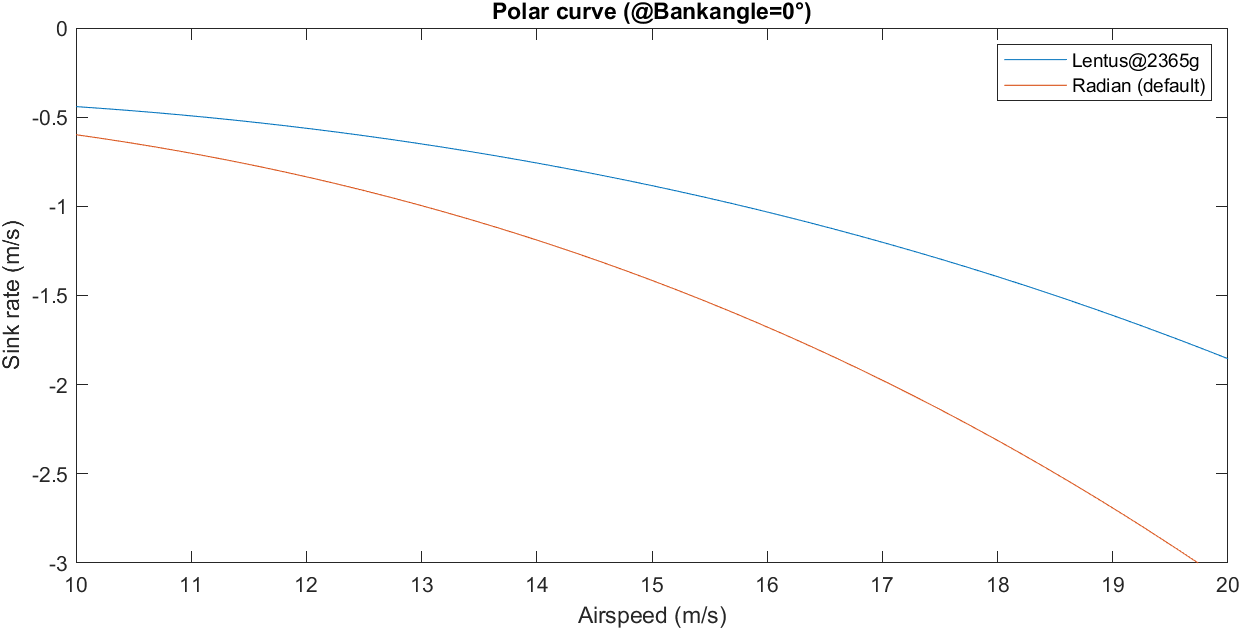
And on the next flight it seemed to follow the thermals much better.
Log: https://1drv.ms/u/s!Aii1zfYqI1ZijdgbWkGPwXLyqAOQpA?e=XLrdbC
~45 minutes with ~87% battery remaining.
I’m still working on the setup and tuning, but already the controller and also the plane shows a very impressive performance.
I like the soaring feature of Ardupilot. Thanks to you and all the developers for your efforts to build such an impressive flight controller.
Keep up the good work 
Maybe some feature requests: true total energy dependence compensating for speed/altitude changes (I think you are already working on this) and stepless speed dependent flaps over the whole wing (not sure if this is a good idea/maybe already possible with lua).
Hello, thank you very much for your great contribution, please can you explain what your Ardupilot controller is, I am very impressed with the data you provide.
From what I see of your .param, you have an ARSPD Pitot, you can also comment if you see it necessary or just an improvement.
Thank you very much and happy flights.
To be honest, I didn’t notice the override check box. It worked a treat.
Thanks, Sam.
1 Like
I have a volantex 2400. Can I mount the pitot near canopy or do I need to move it to the rear (for throtte turbulences reasons° ?
Hi, I’m flying again today and had a lot of pit stability issues. I think it is because I have TECS_SPDWEIGHT = 2, and TECS_SYAIRSPEED = 1.
Of course I do not have ARSPD, and the TECS_SYAIRSPEED function does not work in relation to the FBWB or CRUISE modes, in such a way that since it does not have real air speed information, TECS_SPDWEIGHT tries to maintain altitude by putting Pits, which makes it enter into lost.
I need to know if it is possible for Soaring to work fine with TECS_SYAIRSPEED = 1.
All my tests have failed, and I think it is because I am not using a real Pitot ARSPD.
I need a clear opinion on all this.
Thanks.
Hi Bastian, my gear is:

- Multiplex Lentus Thermik 3000mm RR (stock, except the ESC)
- Mateksys H743-WING
- Mateksys GNSS & Compass M9N-5883
- Lumenier Razor Pro F3 BLHeli_32 45A 2-6s ESC (Rev32.8)
- SDP33 Airspeed sensor
- Pichler RED POWER 3S 4500mAh 25C LiPo (296g measured)
- 3DR 433MHz Telemetry
- FrSky R-XSR (Accst Firmware)
- FrSky Horus X12S with Yaapu Frsky Telemetry Script (v1.9.3)
Regarding my opinion of the need of an airspeed sensor for soaring.
As far as I understood, Sam’s soaring code tries to estimate the normal sink rate of the plane (every plane should be sinking in still, not rising air when gliding whit motor off) with this equation:

Which gives a plot like this for my Lentus:
It subtracts the actual measured sink rate with the calculated sink rate and then knows whether the air around the aircraft is rising or sinking. Sam is calling this the nettorate. Very cool. And nettorate is transmitted to the vario of my Horus, which shows the sink rate of the air around the plane. How cool is that.
As you can see in the equation, the airspeed is three times in the formula and two of them squared. A small deviation would probably have a large effect. I could imaging, that in gusty wind conditions where the windspeed changes often, the synthetic airspeed might be too sluggish to give a good performance.
I’ve enabled the synthetic airspeed calculation. So you can compare it in my logs (CTUN.SAs and CTUN.As).
Hi sonic,
Glad it’s working for you and thanks for the suggestions!
- The vario should already handle total energy i.e. it takes into account airspeed changes via a correction term vdot*v/g. There is likely room for improvement as most people fly quite a constant speed, so this correction does not get strongly exercised. That will change soon as speed to fly is coming.
- You can already use the 2-stage automated flap deployment described here and set up full-span flaps using a combination of “flap” and “flaperon” servo functions. A continuous change with airspeed would be a great feature.
@adcam you will get a better result with the pitot in the rear or on the wing out of the propwash. However if this isn’t possible there is also the “hidden” options of setting ARSPD_USE to 2, which means use it only when throttle is zero.
Hi @Bastian
There are limitations with the synthetic airspeed but it should work OK depending on conditions, some people are flying with that setting. Can you share a log?
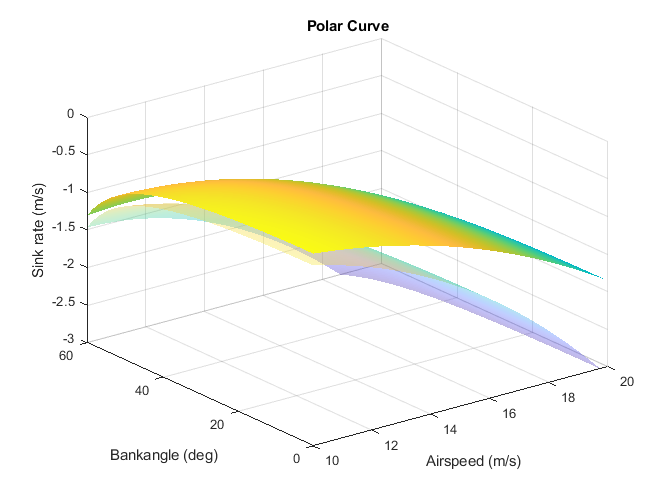
@sonicdahousecat that’s correct, nice setup and nice surface plot ![]()
Hello Sam, I am attaching a record of one of my flights, in which you can see the malfunction of Pits
Hi Bastian, what model are you using? Is the center of gravity correct? How heavy is it?
It should fly very well in cruise mode if you want to use the soaring feature.
A Volantex ASW 28, the same one used by Samuel.
In the registry that I have passed, I modified some data of Samuel’s .Param, for which you contributed, in search of some solution to my problems, but I think the result was worse.
It is possible that I have some wrong parameter, and this is the cause of the problem, but I am not able to see what I have wrong.
I thought for a moment that the Ardupilot code for the FC that I am using, an Omnibus F4 Pro, had some problem and was not enabled for the use of TECS_SYNAIRSPEED, so I was asking about this point.