Yesterday i testet smartRTL function on a small quad with pixracer running Copter V3.6-dev(2c68b5da).
All works well, however, an error occurred during the second smarRTL during the same flight:
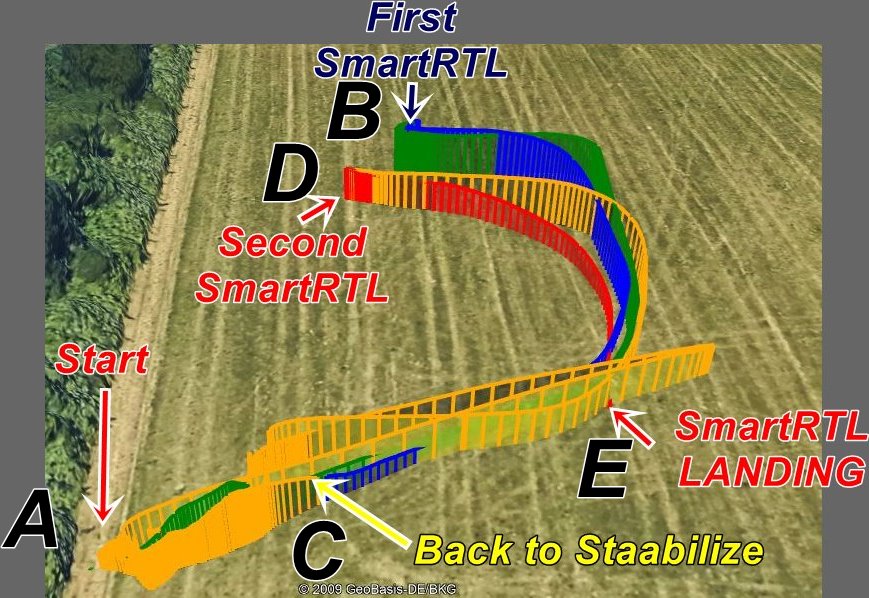
During first smartRTL the copter flew nicely back (blue track B->C) until i switched back to stabilize (yellow track C->D).
Triggering a smartRTL again (D->E red track) then the copter already braked at point E, landed and disarmed instead of flying up to homepoint a
logfile: https://www.magentacloud.de/share/qm334sjgna
Regards
Rolf