I am seeing small oscillations in the logs that I did not notice visually during the flight:
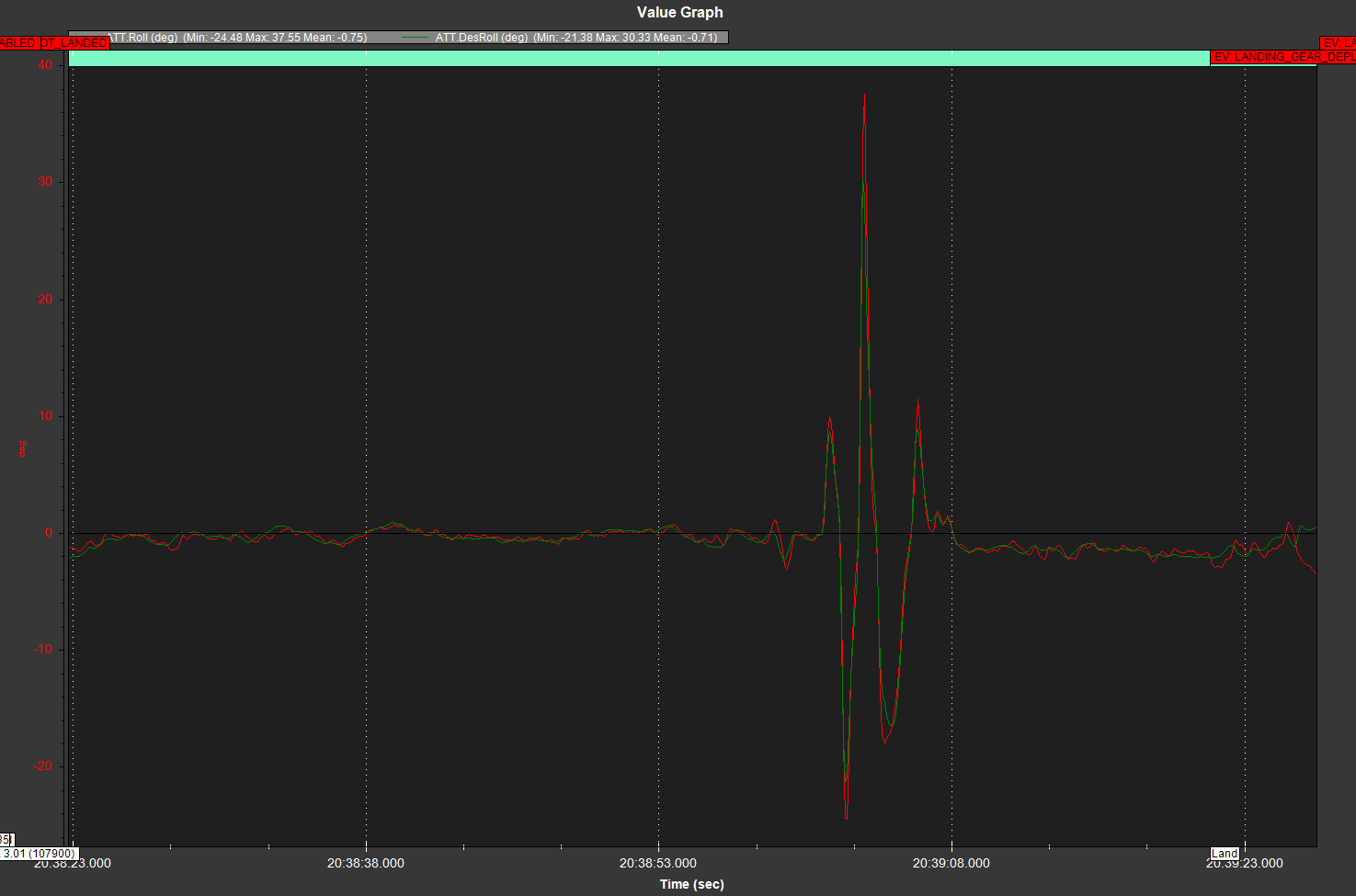
Roll:
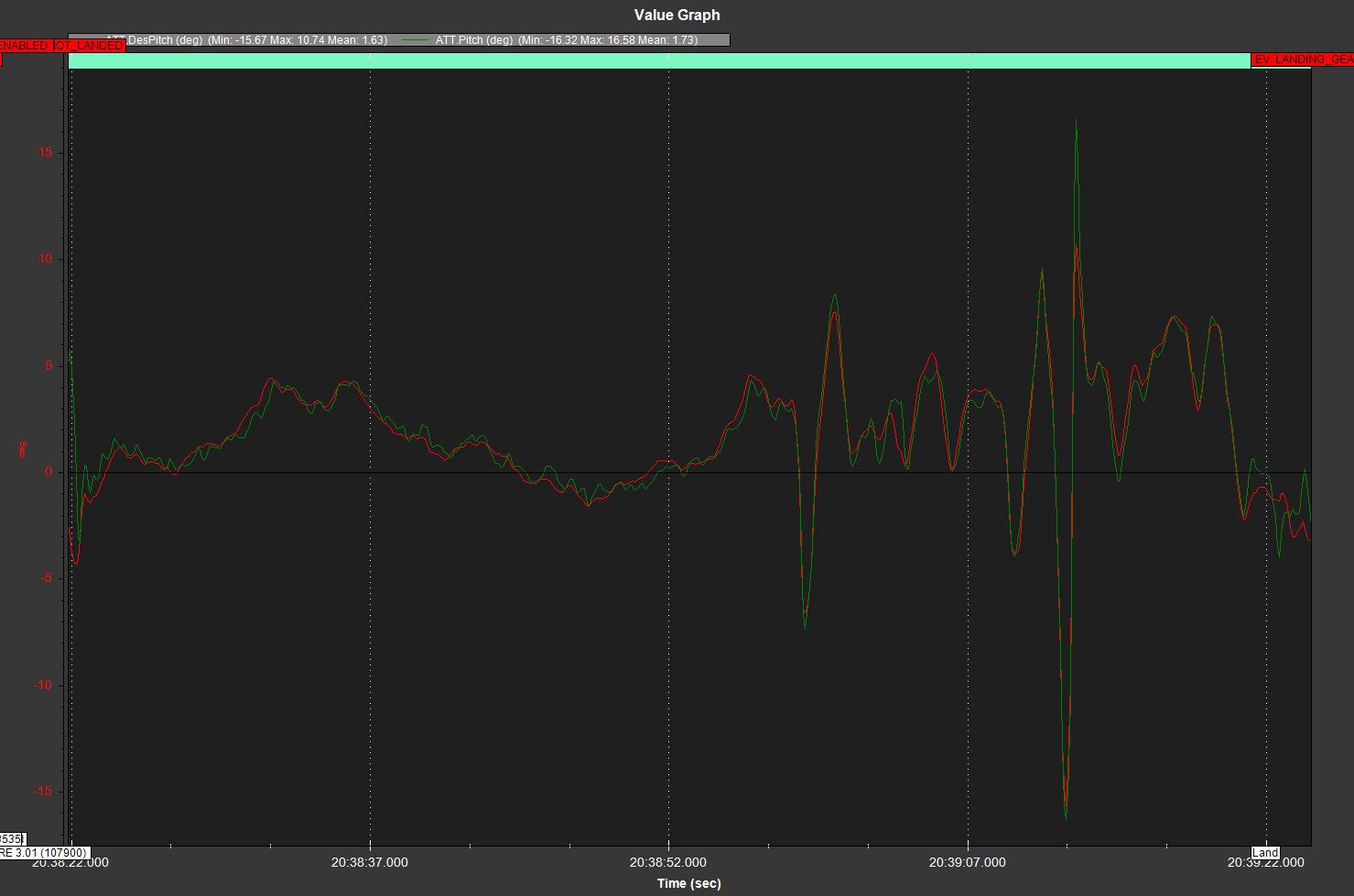
Pitch:
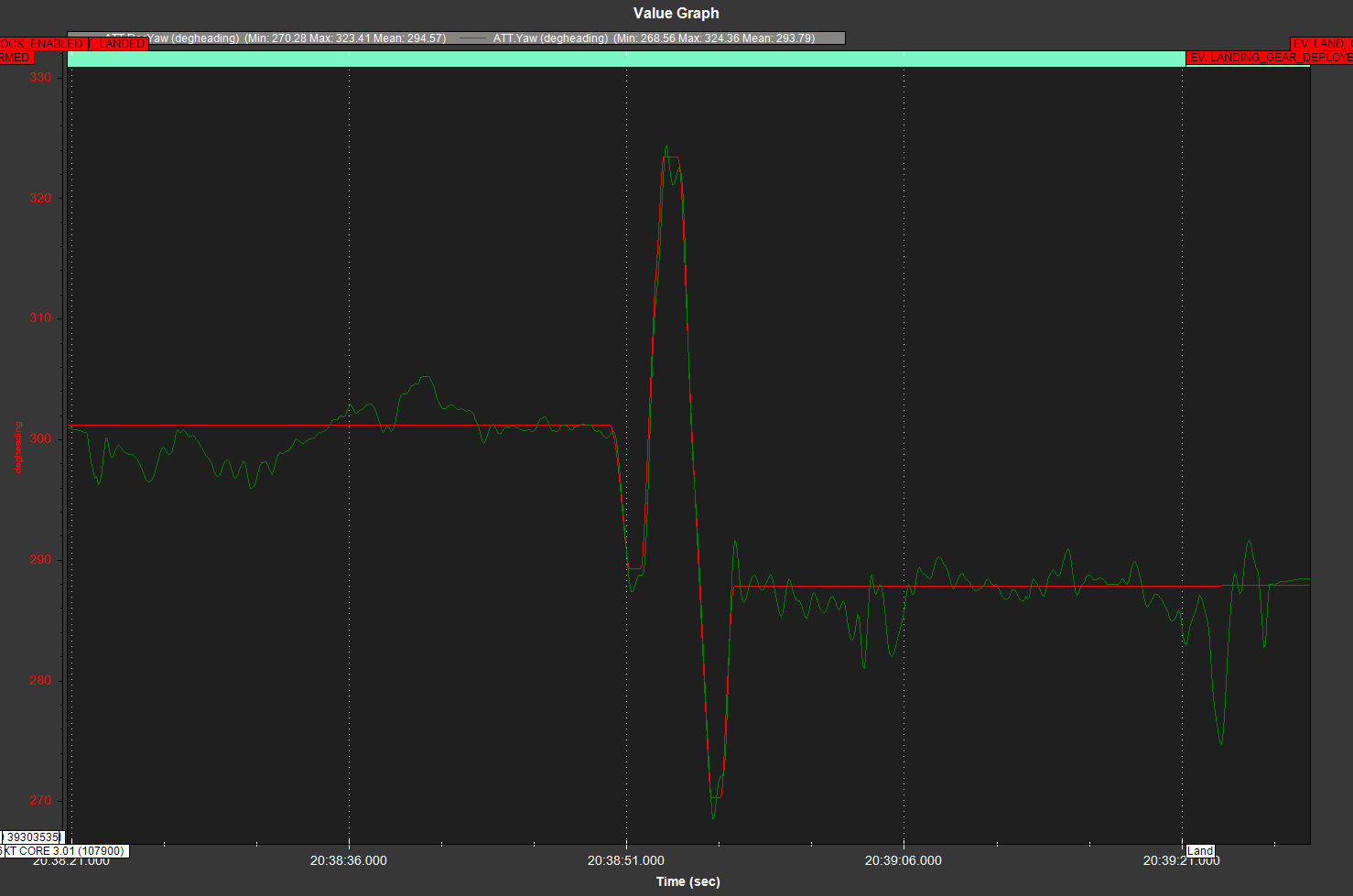
Yaw:
Is this something to worry about and if so what is the best way to deal with it? Importantly, this drone is an X-quad with motors tilted circumferentially 5 degrees, to increase yaw authority.
My theory is that the increased yaw authority is too strong for the current parameters, causing oscillation in yaw, and the motor tilt causes coupling between all axes, leading to oscillations in other axes.