I was trying to use QGroundControl to fly a mission but every time I tried to upload the mission to the drone, I received and error that stated (MAV_MISSION_INVALID_SEQUENCE. I finally found this on this: (The SkyViper has its own app that runs on android or iOS, but to access the full capabilities of the ArduCopter firmware you may prefer to use another ground station package. The SkyViper can work with a wide range of GCS software, including MissionPlanner, QGC, Tower, MAVProxy etc. For each of them, set them up to listen on UDP port 14550. The SkyViper uses MAVLink2 by default, which doesn’t work with some older GCS software (such as Tower). To use those GCS versions you need to change the parameter SERIAL1_PROTOCOL to 1 from the default of 2. That will allow MAVLink1 GCS implementations to connect. As the SkyViper uses UDP broadcasts you can connect from multiple devices at once.) and changed the parameter.
That still didn’t work, so I decided to do a factory reset from the web page. When the SV restarted it would not respond to the controller. I looked at the web page for flight parameters and there were none listed. I then found instructions for placing facreset.txt on the SD card, but that did not work.
I would appreciate any help getting this reset so I can fly again.
I am able to connect to the SV through the web page. When I open the app it says it needs to connect to the controller, I turn it off and on, but it still doesn’t connect. After I skip connecting to the controller the apps says a firmware updgrade is needed. It seems to updgrade the firmware and says it will need 15 seconds to restart. I let it sit at that screen for several minutes, but it never finishes.
I have tried binding the controller to the SV.
I haven’t tried starting it up without an SD card. I will have to give that a try tonight. I wonder if that will do anything?
I admit I’ve not done this, but it is documented here: http://ardupilot.org/dev/docs/skyviper.html#transmitter-tricks
Did you follow this procedure?
If so, what was the result? What did you hear? Did you try it more than once? Did you try DSM2 or DSMX?
I tried powering on the drone without a SD card inserted without any luck. I tried powering on the controller, once with the left button held down and once with the right button. The controller seems to make the typical noises at startup.
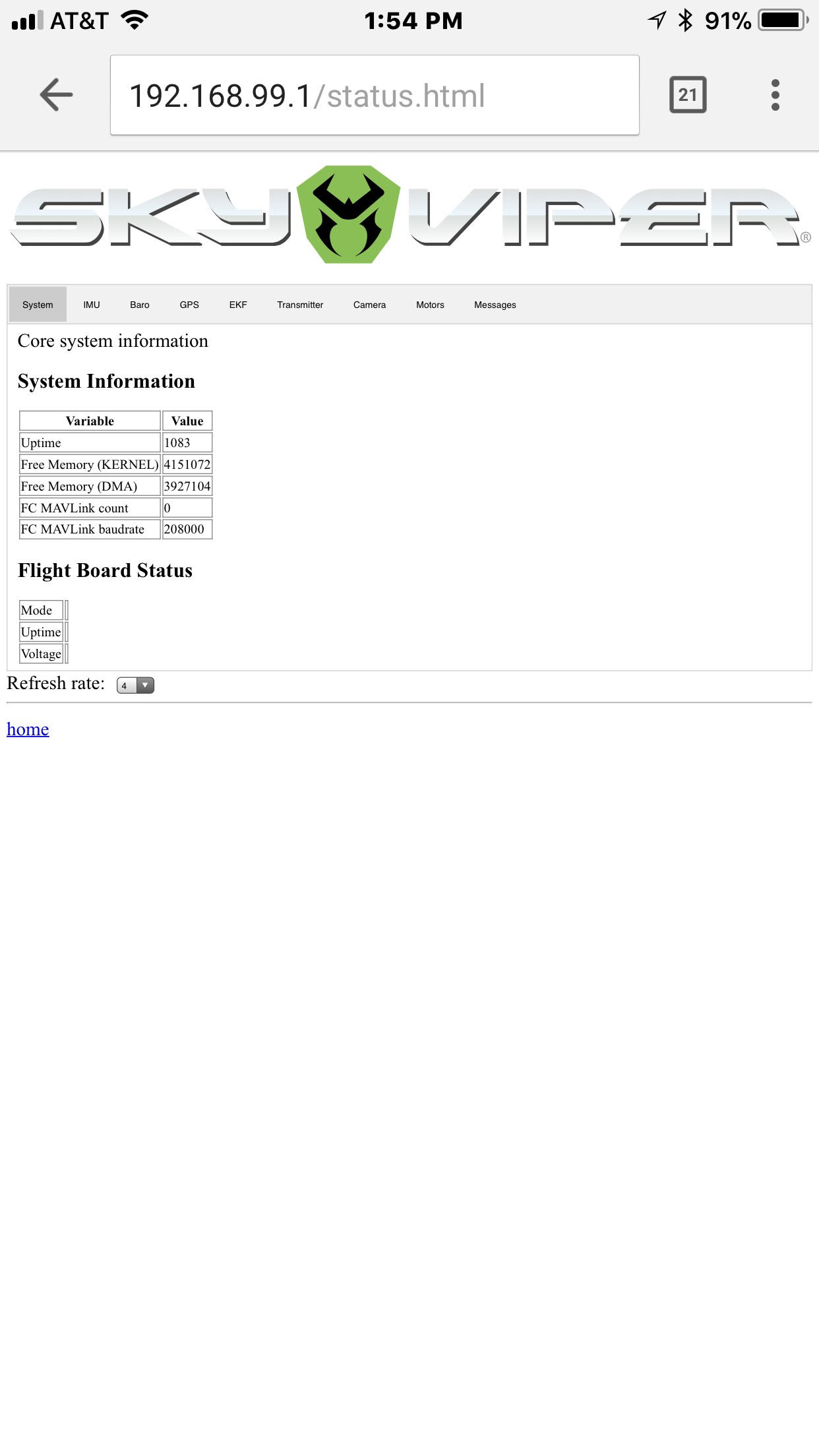
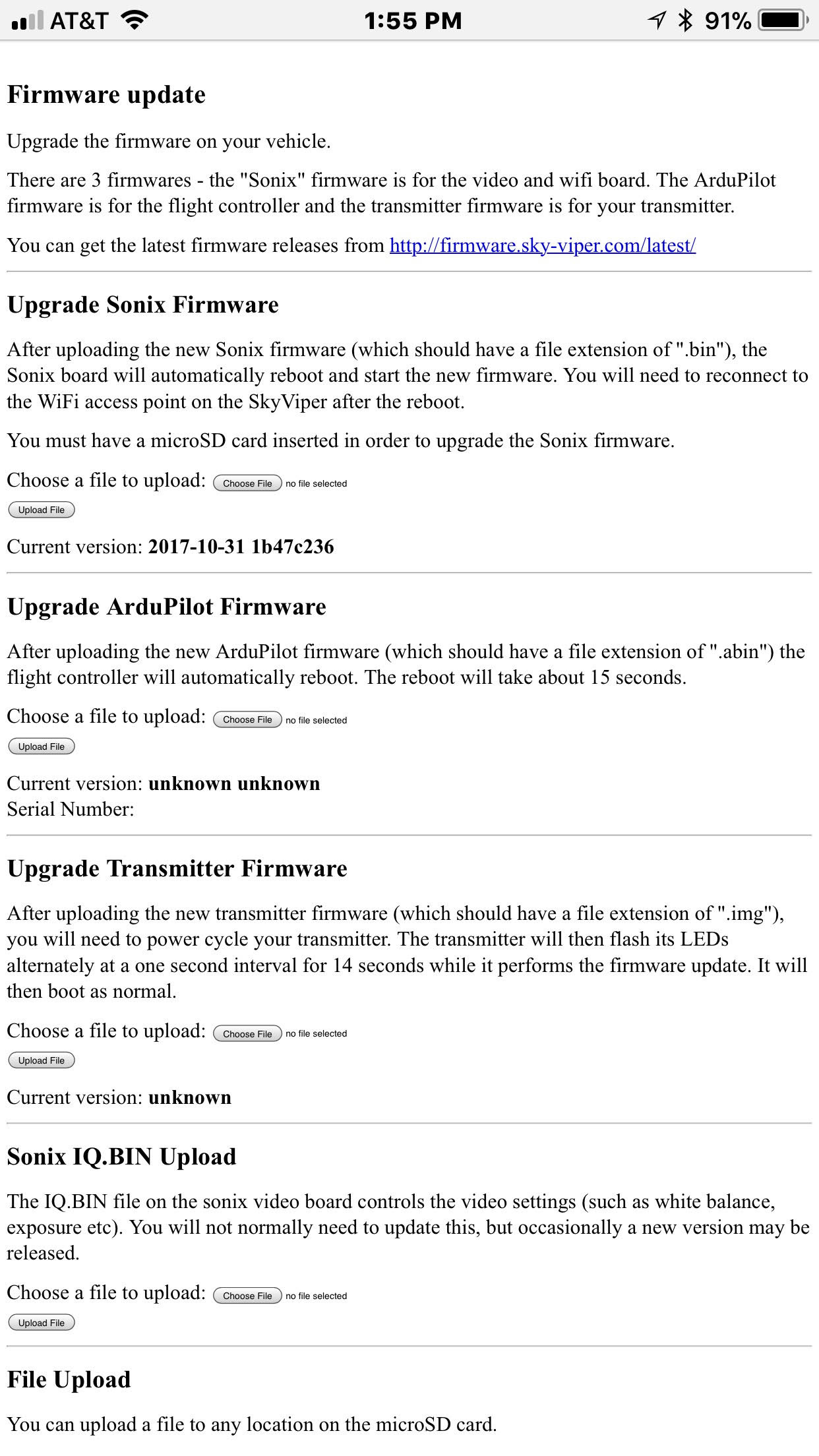
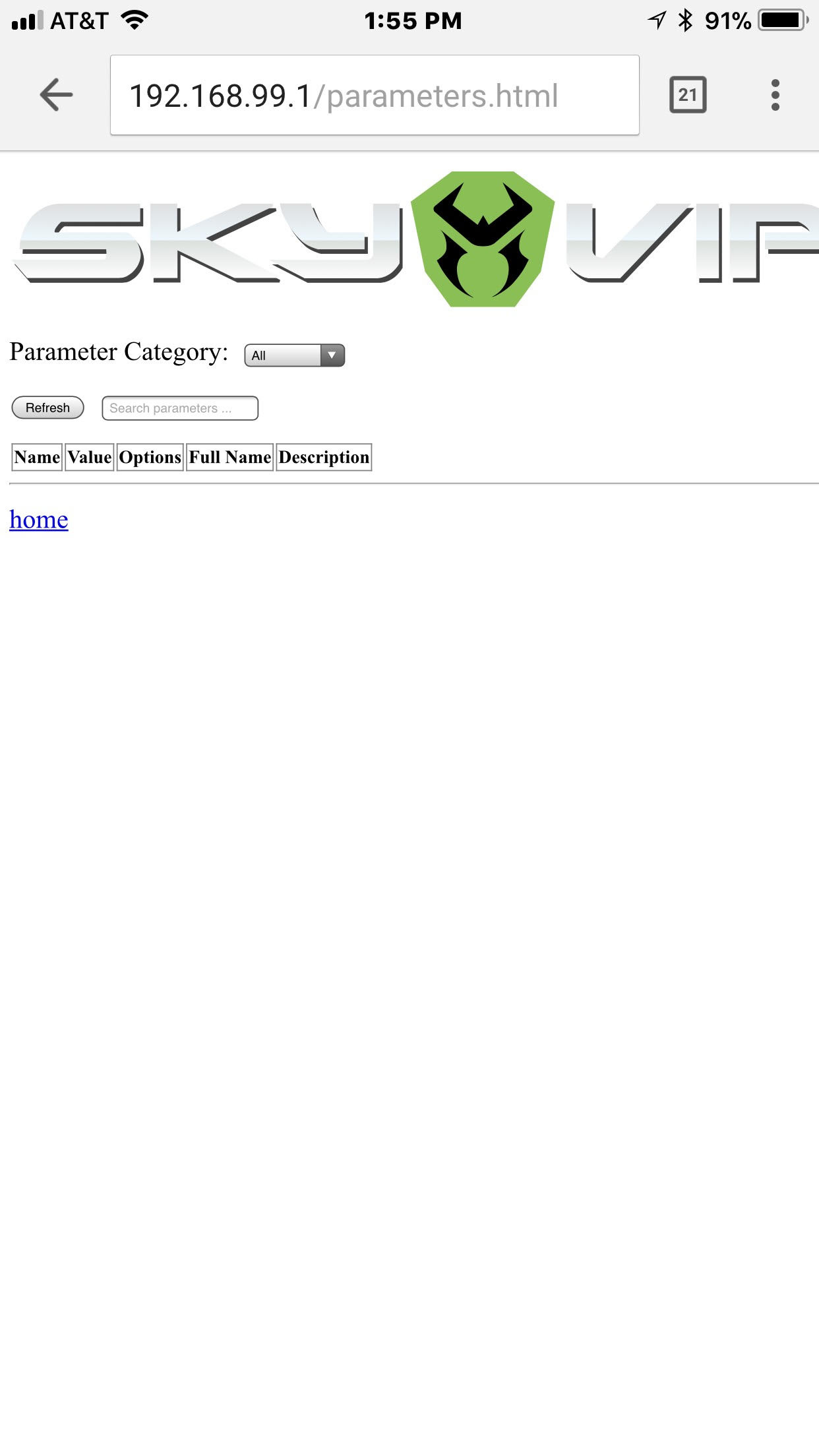
Here are some screenshot from the webpage interface.
The firmware page has unknown listed for the transmitter and flight controller and nothing shows up on the flight parameters page.
Thank you so much! This got my wifi broadcasting again…but now my controller starts up and just freezes. i can’t even turn it back off without removing the batteries.
UPDATE: I was able to get it working by using Telnet 192.168.99.1 2017. Using ‘help’ I was able to change the Baudrate to match the firmware that I had inadvertently changed. I then went into the AuduPilot Firmware and reset the parameters. Then I had to Telnet back in and change it to the new Baudrate. There are instructions in a couple of different places but wanted to get the fix for this one so someone else doesn’t have to search to find it.
Thanks to all those that had the information out there. I am not a programmer so it did take some time!
I have this exact same issue. If you got your working, any help would be appreciate.
My 2450 will not bind to the transmitter… And When I go to SV viewer app it tells me to re-pair with controller which it wont. I can’t continue so I have to skip Then says firmware update and won’t let me skip I have to continue. Then says updating flight software. Then says will reboot in 15 seconds And it just keeps spinning. Also when I go to the server it shows no values for anything and flight parameters shows nothing. Reboot,bind,updates, Nothing !!! I can see the camera works and that’s about all. Any help will be greatly appreciated
It definitely sounds like you probably have an issue with the flight controller not communicating with the SONIX board.
I’m not the expert on fixing that problem but it involves simply setting up a serial connection over the WiFi AP to the SONIX and resetting some values. Have you been playing with settings or changing things? Just curious, or did it “just stop working”? If you’re getting video that means that the SONIX hasn’t gone bad, so I’ll just assume that the baudrate has been changed and it needs to be reset. With the Tx not binding, that is unrelated to the SONIX. It connects directly to the Flight controller. I suppose there is a chance that the Flight controller isn’t booting properly. Perhaps your VERY first effort is to factory reset the Flight Controller.
after you do that, you may find that everything is working. Follow the instructions carefully!
If Factory Reset doesn’t work, then reload the Flight Controller firmware. using the “Load with the SD card” method. That’s pretty easy. It is possible to “brick” the flight controller, but it is totally unbrickable because the SONIX has proven to be very reliable, and all of these reset and loading methods are performed by the SONIX board.
For all troubleshooting and developer stuff look here: http://ardupilot.org/dev/docs/skyviper.html
You’re bound to find some info there that’ll help including the serial connection to the board, and tricks to bind the transmitter.
You’ll want to do it on a computer…it doesn’t require a ton of technical knowledge…but some computer experience is expected when we are writing the guides on the wiki page i sent you.
Remove the Sd card from the craft and plug it into an adapter (USB is most common, dirt cheap) then plug the adapter into your PC and write/copy the files to the root directory.