I had made a Skyhunter 1800 vtol conversion, I had already done several flight tests in Qstabiliced, Qloiter and finally I made a transition to FBWA which turned out to be pretty soft but not the other way around.
When going from FBWA to Qloiter the plane began to perform an aggressive oscillation on the roll axis until it landed on the ground (I try to switch Qstabiliced but I was near of ground).
Now I read Gerg’s message saying that it was not convenient to make the transition from FBWA to Qloiter directly, I read it late Can this problem be due to what Greg says?
On the other hand, is there a guide to interpret all the data of the logs?
or to know what each parameter means? How I can search the origin of the problem?.
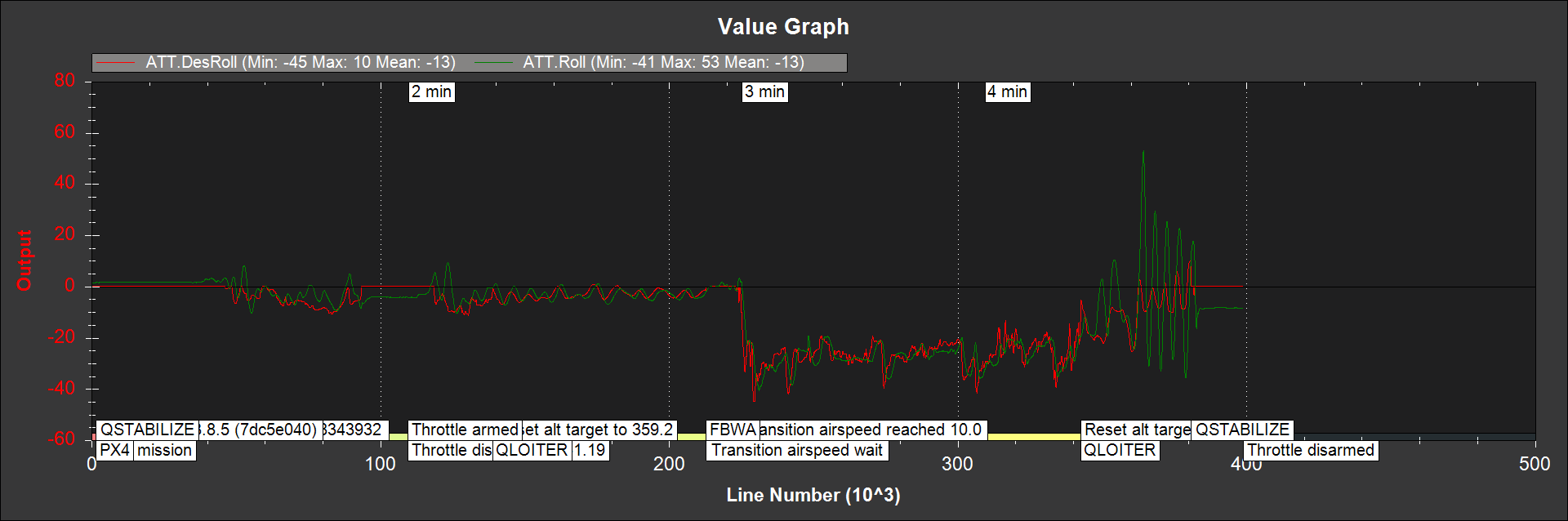
I put a graphic about Roll axis and the bin and log file.
Although the warning has been removed from the Wiki, I would never switch from FBWA mode to QLOITER mode. A typical test flight would be:
takeoff in QLOITER or QHOVER
switch to FBWA mode and advance throttle to start flying fixed wing
switch to QHOVER or QSTABILIZE modes to go back to quad mode.
optionally switch to QLOITER mode once the plane slows or stops
This might be the easiest thing to try on your next flight. In general, I do not use QLOITER mode on my VTOLs because it is much easier to control in QSTABILIZE or QHOVER modes due to the forces of wind on the wings. A hovering plane is much more susceptible to wind than a copter. Always try to keep the nose pointed into the wind.
My assumption was that you were happy with the hover performance in QSTABILIZE, QHOVER, and QLOITER modes before trying FBWA mode. If not, then spend some time tuning the hover modes.
I was thinking that going from FBWA to QLOITER mode caused the oscillations so testing from FBWA to QHOVER mode may be fine. Remember that in a VTOL your emergency fallback mode is QSTABILIZE mode so make sure you are comfortable with how it performs. The initial testing is best done on calm days.
Finally I was able to make the test flights and the result was ok, although, I have to adjust the motor and propeller pair since I have a very high consumption and I have to fly with some very large batteries that make the model weigh a lot.
However, the problem discussed above has apparently been solved when making the transition from airplane to Qstabiliced.
Thanks for reporting back. I am glad to hear it worked better.
You can always change from FBWA to QHOVER to maintain altitude if you like and then later change again to QLOITER for landing. I have found that when not doing an autonomous flight and it is windy that I have better control in QSTABILIZE mode to bring the aircraft back for landing. This may just be my skill preference so you will determine what is best for you.
 Can this problem be due to what Greg says?
Can this problem be due to what Greg says?