I am working on integration of a SkyCat parachute with the dual trigger V4 pro module. This accepts 50Hz PWM at 1-2ms range. At 2ms the parachute is deployed.
Here are some important settings:
COPTER VERSION: 4.3.6
SERVO13_FUNCTION: 22
SERVO13_MIN: 1000
SERVO13_MAX:2000
SERVO13_TRIM: 1500
The servo 3-pin cable from the parachute is connected to my PixHawk Cube Orange rail AUX5, but no signals from the FCU seem to be fed to the trigger unit. I can see this, since the trigger should blink green LED upon 1ms PWM, and blink red LED upon 2ms PWM (chute triggered).
Moreover, if I connect the same cable to an RC receiver output or to a servo tester, the above mentioned expected behavior is occurring. Thus, I believe it has to do with the PWM signal from the Cube. Any help/ideas or parameters I should check will be appreciated at this stage.
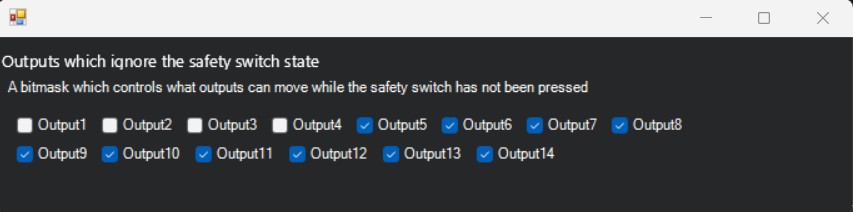
By default Ardupilot doesn’t send any PWM to the output unless it is armed. You can set BRD_SAFETY_MASK to an appropriate value to override this behavior for parachute channel.
To help any other user with similar problems, this issue is related to the peak-to-peak Voltage of the PixHawk Cube PWM AUX signals. The internal resistor of the SkyCat parachute on the signal channel is not big enough, which leads to a voltage drop of the PWM pulse to less than 2.5Volts peak-to-peak (~2.2Volts) when sending pulses. If you connect to one of the MAIN ports, which can output 5Volts, the voltage drop is not as significant (~4Volts) and thus the PWM width can be measured by the parachute trigger mechanism. All mentioned measurements where carried out with oscilloscope.