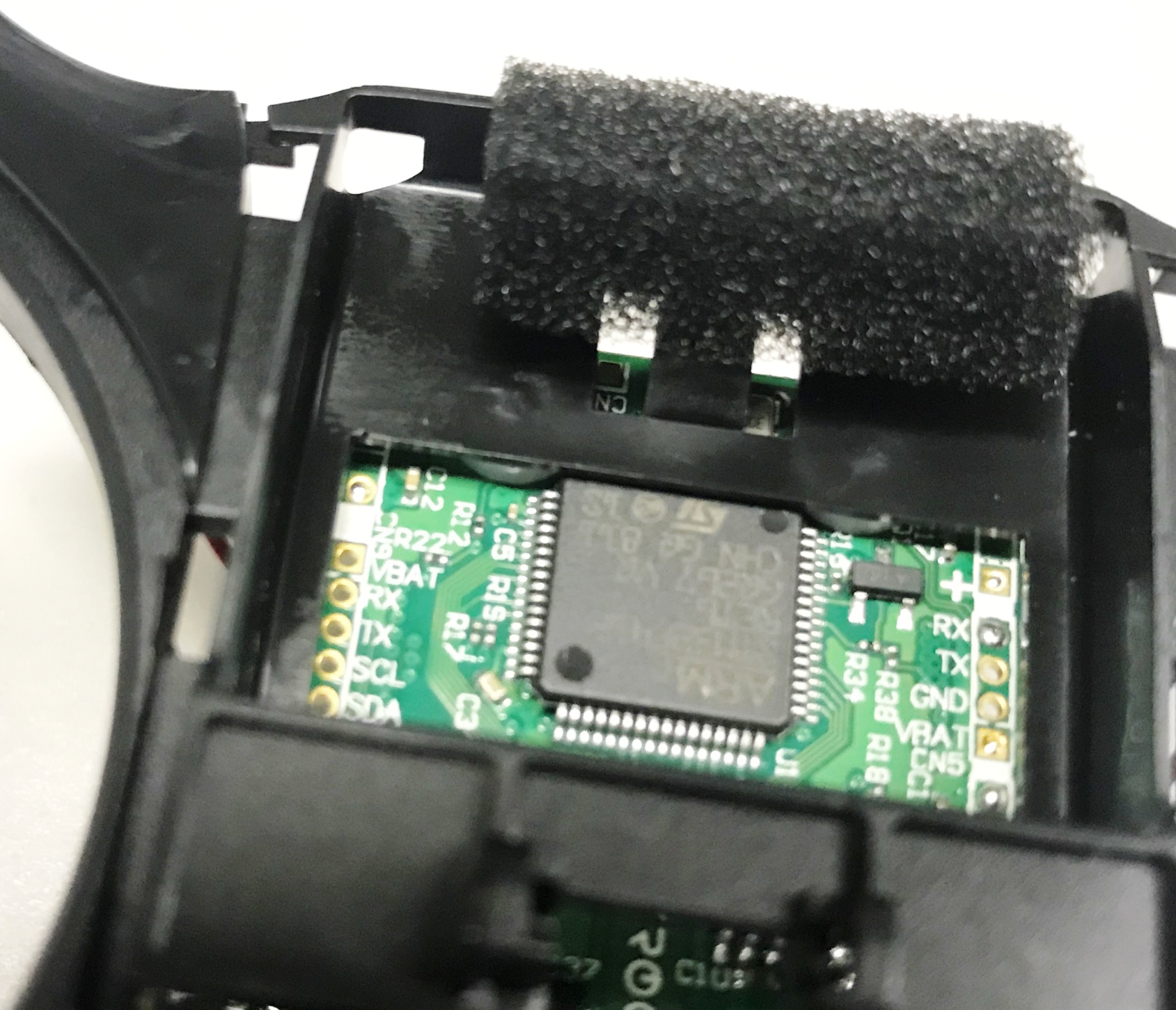
The new sky viper Fury flies unstable, something like poor tuned ArduCopter. Expecting indoor stability by surface scan is hardly observed. Anyway, tare down Fury and found that sponge over the barometer is not put on right position. I would like to share.
2 Likes
Thanks for sharing @Jiro
Remove original sponge from wrong place and push into frame and sensor. But no luck to improve flight behavior.

1 Like
I am thinking of getting one of these. Do they all fly so bad? Every review I see shows the fury flying all over the place. I thought the Ardupilot board was supposed to make these super stable.