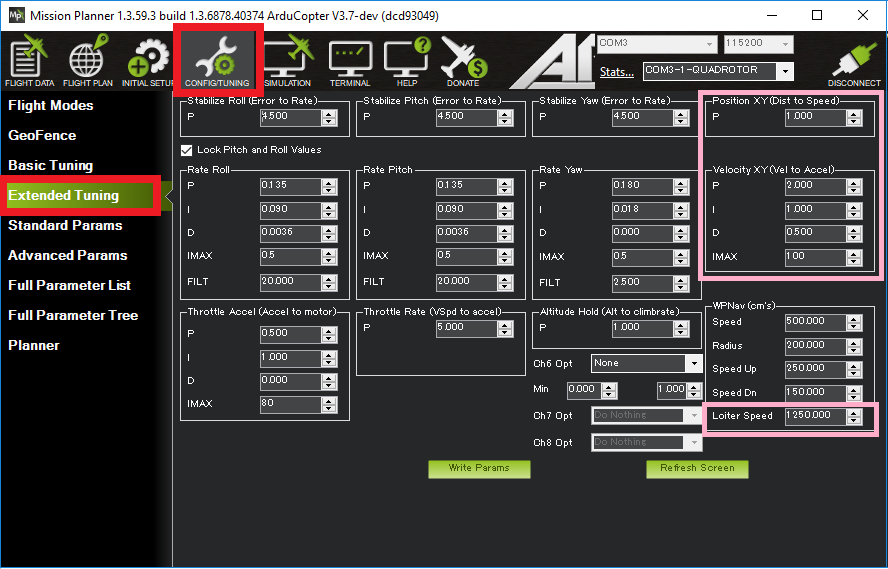
I seemed to have fixed the wobble issue I was experiencing when my quad was pushed around by the wind in “Loiter” mode by lowing the P and I settings located all the way on the right of the below image. So my question is, if I lower the P and I in the pitch and roll setting box, will it also lower the sensitivity to the imputs from my remote in "AltHold mode?