Hello Everyone,
I am a novice buiding a rover using dc motor in skid steering mode. Following are the components used:
Pixhawk 2 with here GPS
normal DC motor
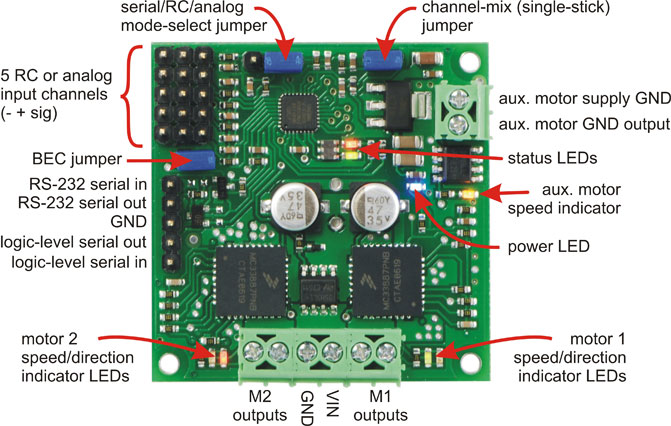
Pololu TReX Jr driver
The servox_function are set properly.
Channel 1 and 3 of the driver Pololu connected to motor output 1 and 3 respectively. Pixhawk configurations done.
Issue:
During motor test, on pressing “test motor C” with a 35% percent around throttle, both the motors start to rotate( only left motor is expected to rotate)
And on spinning “test motor D”, however we increase the PWM, no motor moves(right motor is expected to rotate)
Rover is only moving forward/backward on ground. No right/left movement can be achieved.
Is this the issue of the POLOLU driver? I have tried with LM298 also but with no success.
I believe you need to remove the channel mix jumper from the controller and connect the pixhawk to channel 1 and 2, it’s currently mixing the inputs as it thinks they are throttle and steering rather than left and right.
To set the pixhawk to tank steering you need to set the outputs to left and right motors rather than throttle and ground steering.
Actually I followed whatever was given in the motor and servo connection page diagram for skid steering (3 jumpers in pace and channel 1 and 3 connected to Pixhawk main servo out 1 and 3 respectively).
I will try as per your suggestion and return to you on Monday.
With the said jumper removed,
Pixhawk Main Out 1 connected to channel 1 & Pixhawk Main Out 3 connected to channel 3 and the Servo1_Function= 73 and Servo3_Function= 74, during motor test:
Test Motor C was spinning the desired motor but with Test Motor D, there was no response from the other wheel.
While again with the said jumper removed,
Pixhawk Main Out 1 connected to channel 1 & Pixhawk Main Out 2 connected to channel2 and the Servo1_Function= 73 and Servo2_Function= 74, (ans with some servo function reversed) during motor test:
Test Motor C as well as Test Motor D was spinning the desired motors in the desired direction. While in transmitter, while moving up the throttle channel, both the wheels were moving forward proportionately. And with roll channel, the two wheels were moving in opposite direction causing the turn.
Is this really obeying the skid steering principal? I believe in this part of the documentation, some changes may be brought about and it can be made more specific for novice users like me.
Waiting for your reply.
With Regards,
Moloy