Hi there,
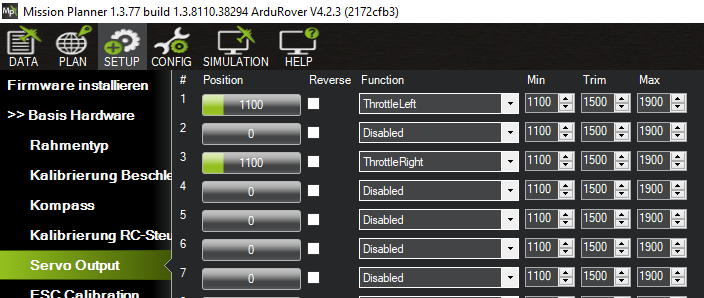
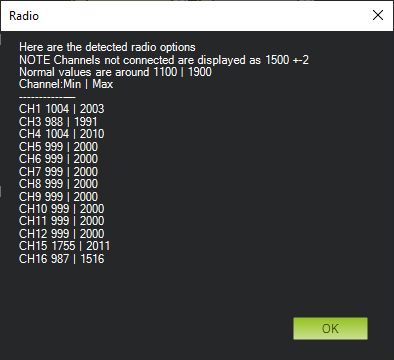
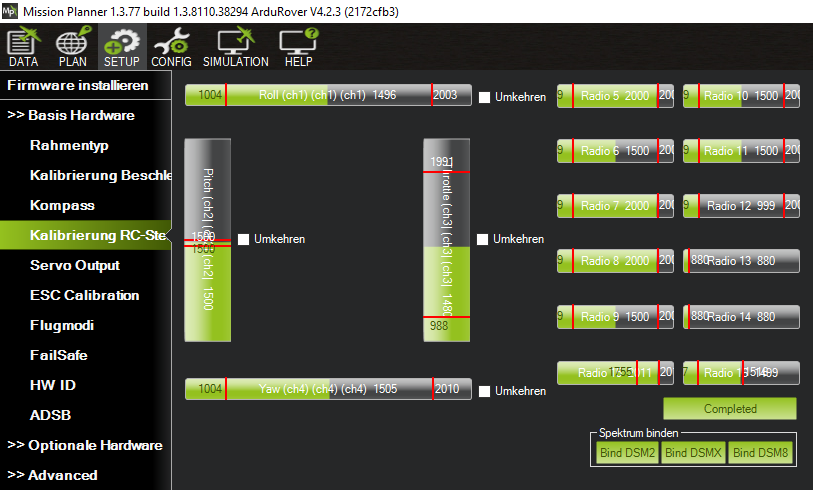
i am lost. I am trying to set up a boat with skid steering. My problem is, that the Servo Out drops to 1100, even when the remote is sending 1500. So the motors go to full reverse.
Forward is also strange, as the servo out is at 1900 allready when the remote is sending about 1600.
Pilot steere type = 0
ACT_brake = 0
If I configure the servo out to RC_3, everything works as expected.
What am I missing?