Hi all,
I am using a Skid Steer Rover with Pixhawk 2 cube.
Pixhawk 2 cube is flashed with Rover-3.4.2 firmware. Jetson TX2 is used as a companion computer.
Recently, I am facing some issues in the GUIDED mode.
Here is what we have done,
- Removed GPS using GPS_TYPE=0, and I used wheel odometry alone alone for indoor pose estimation.
- I did set “origin” and “home” through mavproxy map.
- Then, I used mavros to test the GUIDED mode. Suddenly, all the motors started to spin backwards. The mavros GCS mesages said that “FCU: Crash: going to hold”.
The motors didnt stop spinning even after setting the HOLD mode.
Then I tried to set “rc 1 1500” and “rc 3 1500” in MANUAL mode. The motors backward spin didn’t stop.
Then I increased “rc 3” in steps and observed that motors stopped spinning when “rc 3 1850”
Looks like trim value was set to 1850 automatically after FCU crash instead of rc 3 1500.
This issue didnt happen all the time.
It happens once in ten times.
So, I am sure that my SERVO and TRIM params are correct.
Please help me to sort out this issue. I am also attaching the log(https://drive.google.com/file/d/1dBO57IrXxa97gjne5wO9rczyLGKu3YsE/view?usp=sharing) which I captured when “FCU: crash going to hold” occurs and after rebooting through mavproxy the motors continues to rotate as shown in the following log( https://drive.google.com/file/d/1fhINkHendxqQtnY6JACUkBwow-mNOu4o/view?usp=sharing )
Update 1:
Another points to be noted is
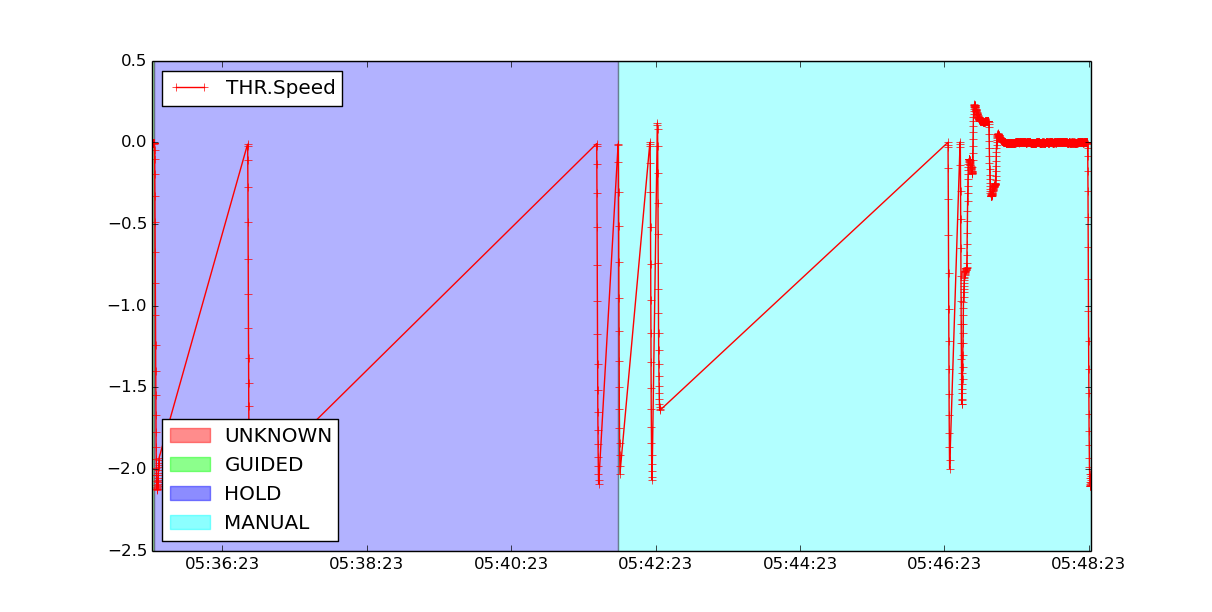
The graph of THR.DesSpeed is different from THR.Speed
THR.DesSpeed

THR.Speed
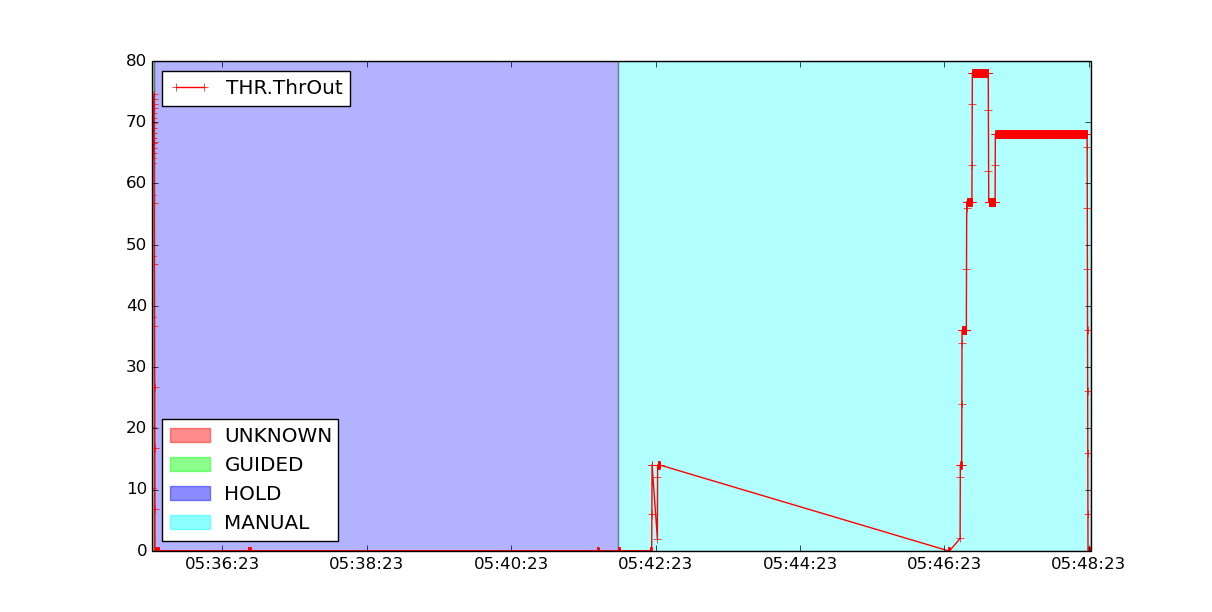
And here is the graph of THR.ThrOut
Looks like I have given 70% throttle (rc 3 1850) to stop the vehicle running backwards.