Hello, please help me. I’m stuck and don’t understand how to get out of my problems. 
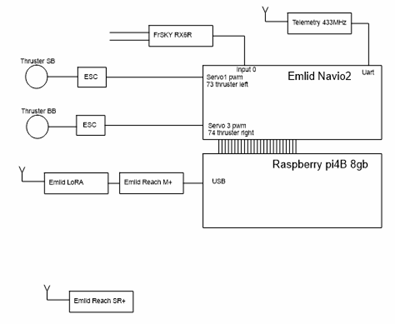
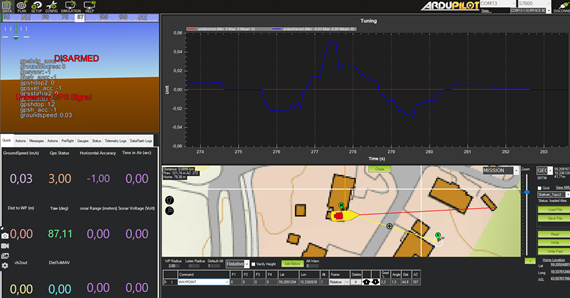
I have a made boat with 2 brushless motors and two ESC. The image I use is the latest for Navio2 configured as rover 4.0. And have configured it with servo 1 as 73 – left throttle and servo 3 as 74 right throttle. Pilot_steer_type 1 – Two paddles input “skid steer”. When I test motor in mission planner setup, I can control both motors forward and backwards. And if I look at the pidachived graph it vary when I turn the controller box (with compass) it react with + and – from piddesired. But when I start a mission and arm it, just one of the motors is running with the same speed and do not seem to react to the piddesired at al.
My physical configuration is a Raspberry pi 4b with Emlid Navio2 as a hat, witch supply pwm to the esc and I use the compass onboard the Navio2. (I also use Emlid Reach M2 and Reach RS+ for RTK, but that should not be need for that to get it to work)
To just spin the motors, I have adjusted the max and min pwm, but it is the same problem with default output.
What am I doing wrong?
Best regards,
Steinar
full paremeter list 2025_09_21.param (15.1 KB)