I am trying to setup my rover as a Skid-Steer. However when I set the Servo1 to Throttle Left, and Servo3 to Throttle Right, the servo outputs do not arm.
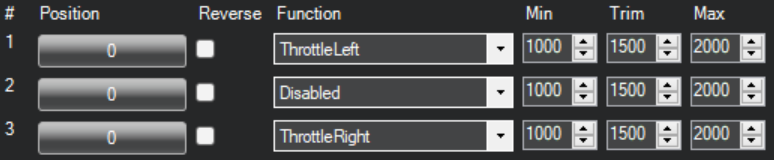
They instead just show zeros.
Even when I manually arm my rover through MP, the values remain at zero.
The current work-around I have done is that I have to set my outputs to RCPassThrough , that way the ESC will receive a signal to arm. Afterwards without removing power I switch the outputs back to Throttle Left/Right. However this is extremely inconvenient.