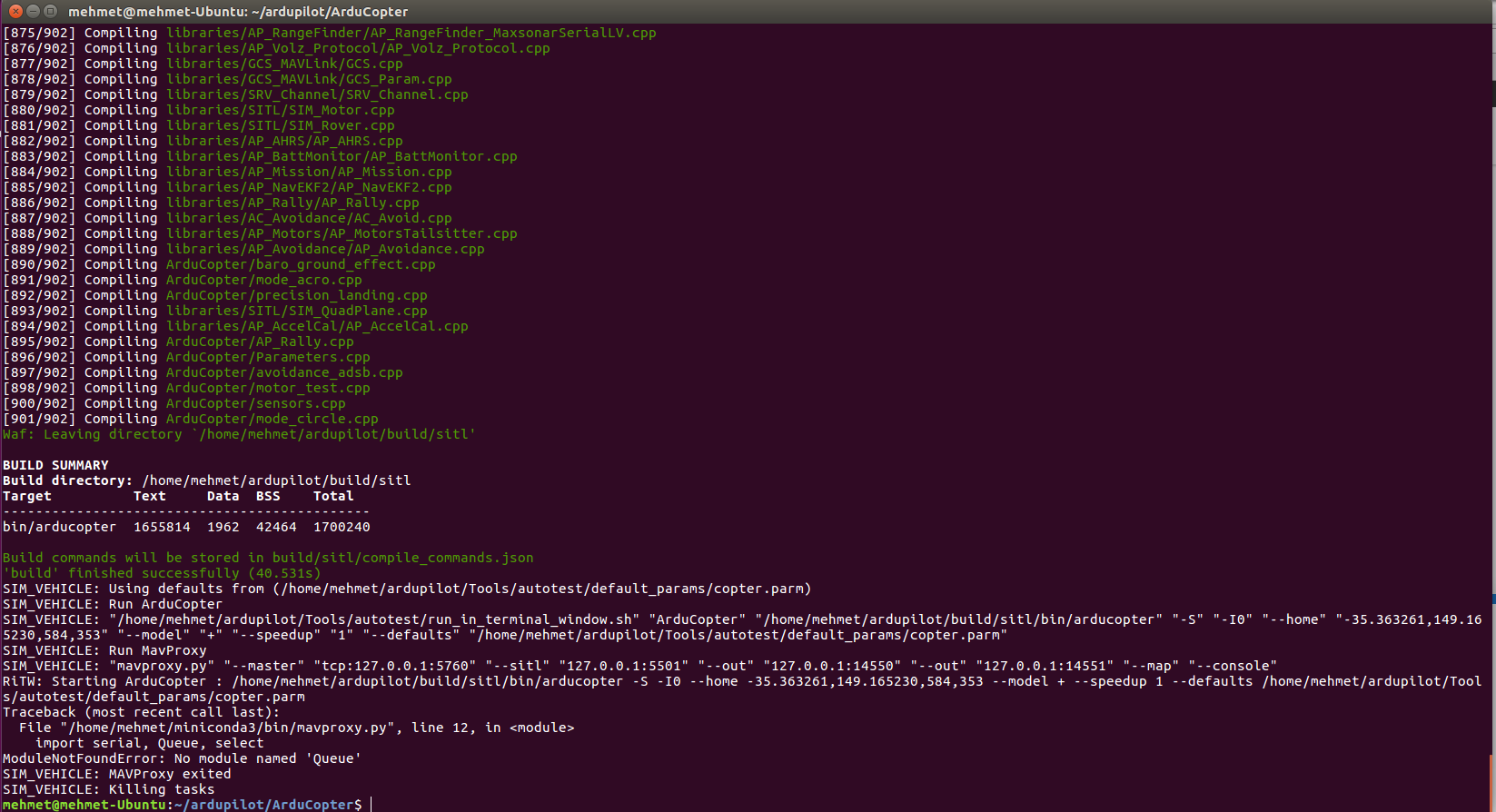
I created an environment with Python v2.7 into Condo and try to run SITL in this environment, but I got same error. Also I add Queue file into manually , at this time give other error ( such as: no readm() function ) . I will try with --no mavproxy.
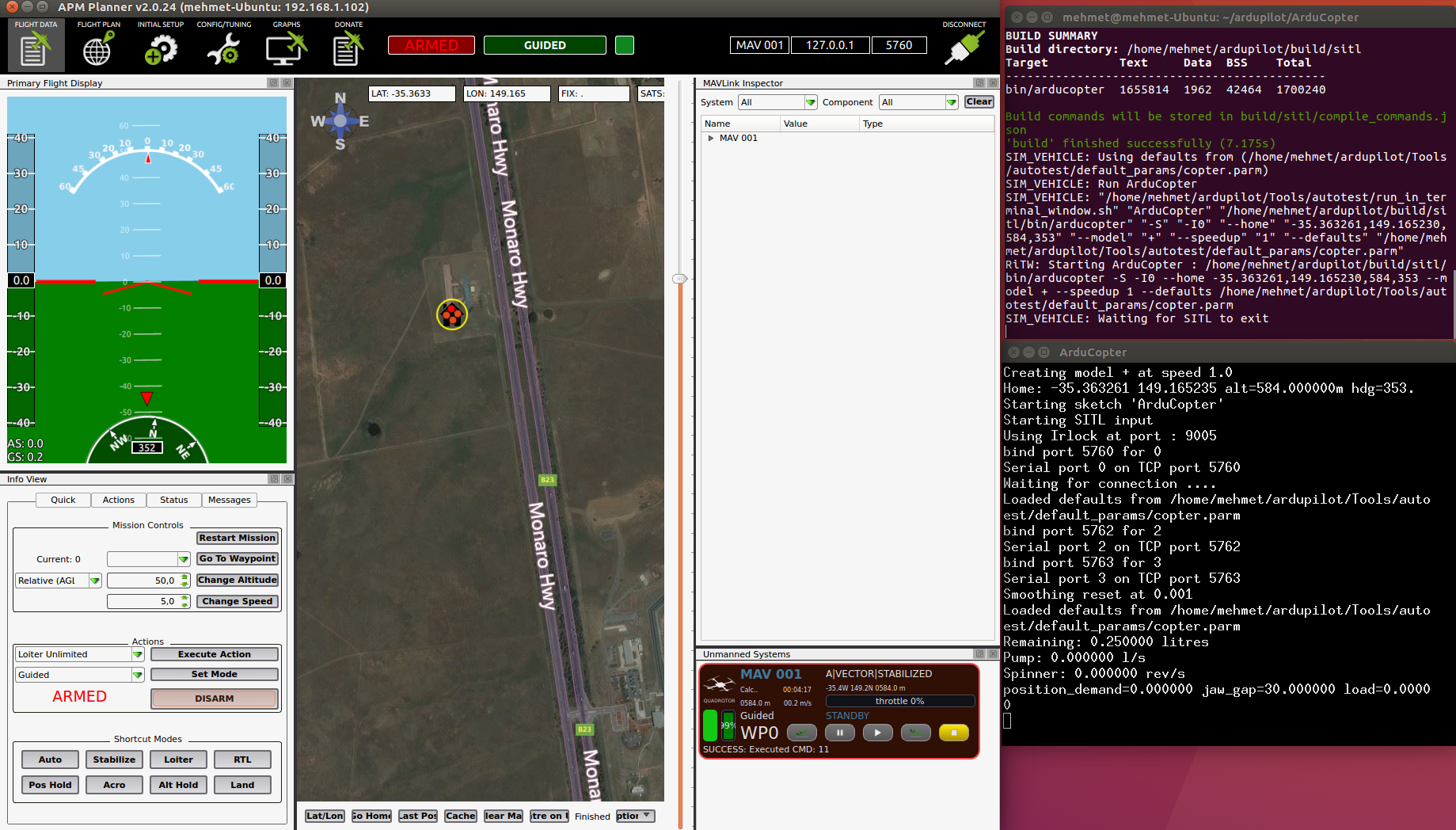
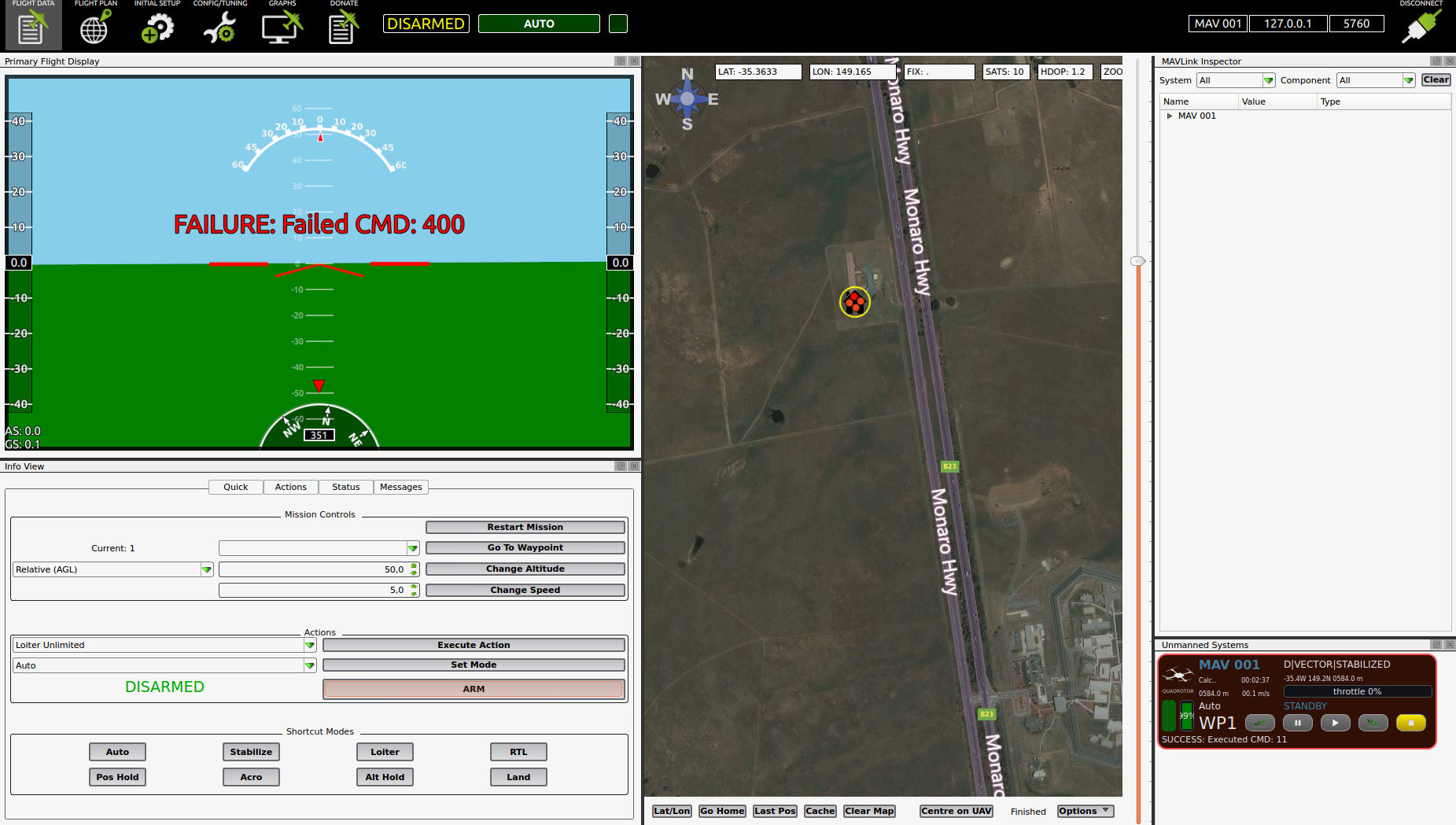
Yes it works--no-mavproxy and I use APMPlanner. Do you know a easy way of takeoff ( like arm throttle / takeoff 40)f in the APMPlanner . There is no takeoff command in quick actions tabs and also I could not be successful with waypoint . I set a takeoff point but I always get cmd 22 error and 400