Hello, I am trying to run simple SITL and read mavlink data.
I run SITL using
sudo python sim_vehicle.py -v ArduCopter -m "--mav20" -f hexa --console --map -L WIPB
the -m argument is for extra MAVproxy argumentss.
Simulation starts to work, and MAVProxy has got --mav20 argument
SIM_VEHICLE: Run MavProxy
SIM_VEHICLE: "mavproxy.py" "--master" "tcp:127.0.0.1:5760" "--sitl" "127.0.0.1:5501" "--out" "127.0.0.1:14550" "--out" "127.0.0.1:14551" "--mav20" "--map" "--console"
RiTW: Starting ArduCopter : /home/alek/ardupilot/build/sitl/bin/arducopter -S -I0 --home 53.117324,23.146073,0,353 --model hexa --speedup 1 --defaults /home/alek/ardupilot/Tools/autotest/default_params/copter.parm,/home/alek/ardupilot/Tools/autotest/default_params/copter-hexa.parm
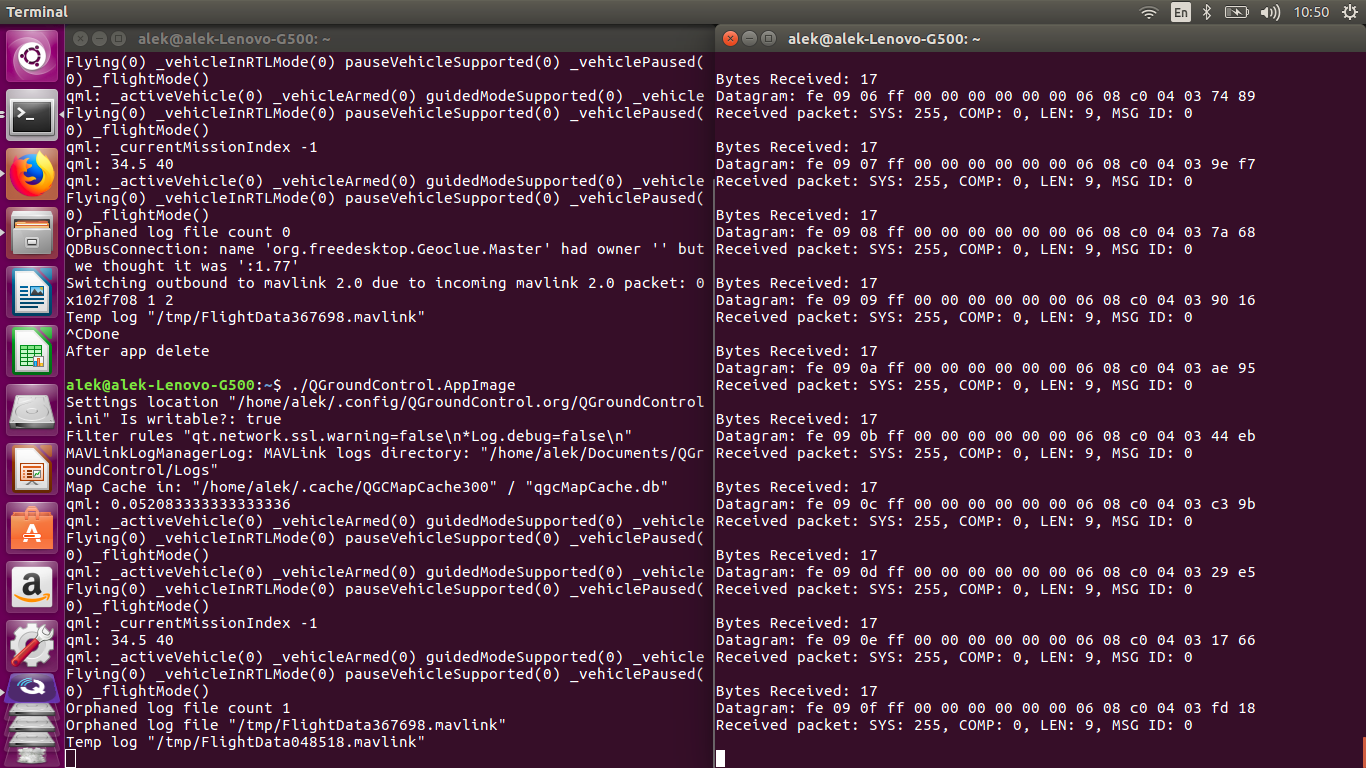
Despite of using --mav20 when i run some C code to read data i can see
Bytes Received: 34
Datagram: fe 1a a5 01 01 1b e4 81 6e 6e 00 00 00 00 00 00 00 00 17 fc 02 00 02 00 01 00 b7 00 37 00 c2 01 e9 b1
Received packet: SYS: 1, COMP: 1, LEN: 26, MSG ID: 27
And as i can see it is mavlink v 1.0 ( 0xFE instead of 0xFD etc).
I have got also SERIAL0_PROTOCOL, SERIAL1_PROTOCOL and SERIAL2_PROTOCOL sets to use MAVLINK2.0.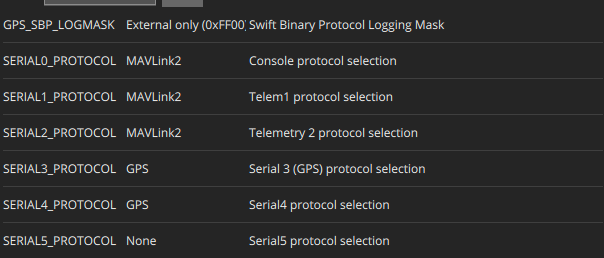
What more i can do, to use MAVLINK 2.0 standard?
Thanks for any help:slight_smile: