Today I moved a new (faster) computer into my workshop. Spend the day migrating files, etc.
I did clean installs of all our favorites applications - including Mission Planner. (and the beta updates)
Now that I figured out my stupid mistake for running SITL, I thought I’d try the new computer on a SITL of my little test mission using spline and loiter waypoints.
TIP: On a clean Mission Planner install, don’t forget to “Set Home Here” or you’ll find yourself trapped in Australia…
For no possible reason I can imagine - this install on a new PC corrects the problem where the battery voltage showed in red.
On my old PC, a un-install and re-install of Mission Planner did not clear this problem. But come to think of it - my “Set Home Here” didn’t revert to Australia either.
Are there persistent files that aren’t removed in an uninstall?
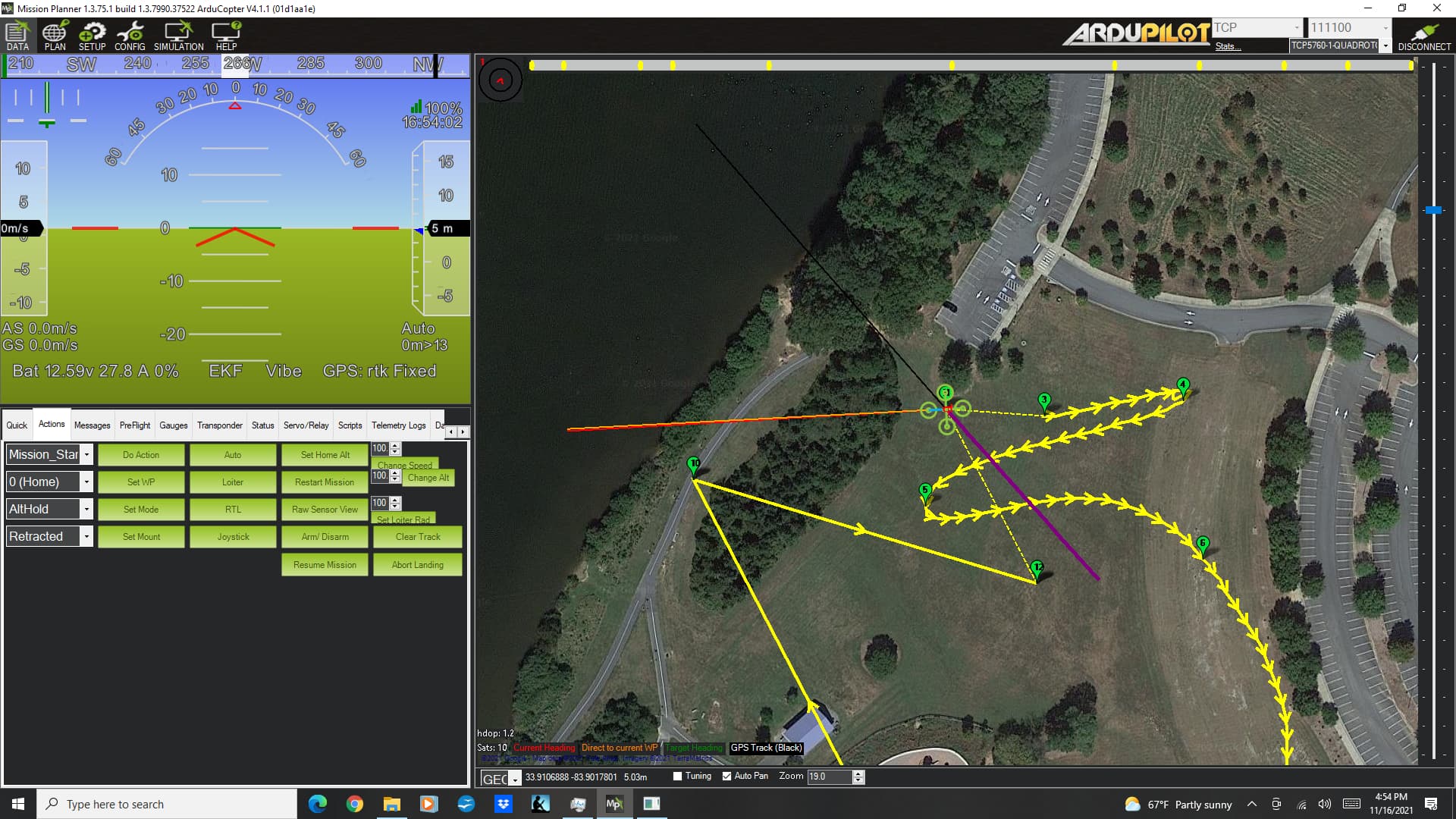
Lastly - a small issue to report. On all my flights at this park, I launch the copter facing south. Before descending on RTL, the copter always yaws to this same heading.
On the SITL, I couldn’t find a way to set the orientation of the copter before takeoff - it’s facing close to North. On the RTL, I sort of expected the copter to return to this heading before descending on RTL, but it didn’t - it simply kept the same heading it took on route from the previous waypoint.
As you can see on this screenshot - the copter landed with a heading West.
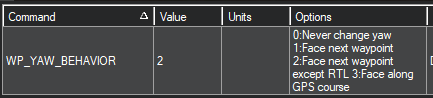
On my copter I set WP_YAW_BEHAVIOR to “3” to cause the copter to yaw to face the GPS course. I could not find this among the SIM_xxxx parameters in Mission Planner’s (Simulation) Config Full Parameter Tree. Probably not a high priority.
I hope this is helpful information. Thank You!
 We always need better docs!
We always need better docs!