I am new in this community, I am pretty much interested in the SITL and X-Plane. I wanted to ask a few questions about that.
If I understand well I can use the SITL and mission planner in order to create a flight plan on X-plane and make my helicopter follow it? I would only need X-plane, AMP and the STIL, no hardware would be needed?
I tried to follow every step to install SITL and mission planner http://ardupilot.org/dev/docs/sitl-native-on-windows.html#id8, I don’t know why but I don’t see any simulation and terminal icon when I run the Mission planner program.
any ideas? is there something I missed?
Hello, Chris, it is hard to diagnise what is wrong, since You didnt post any screens or text of cygwin output, or maybe You didnt installed something, we need more info.
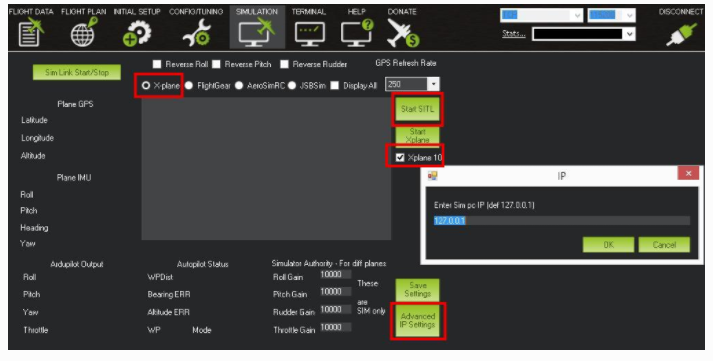
I think everything went pretty fine. but when I get to mission planner I do not see any X-plane connection option.
see the first file attached is what I see and the second what I am supposed to see according to the tutorial.
I try to assume that You installed and set everything rigth.
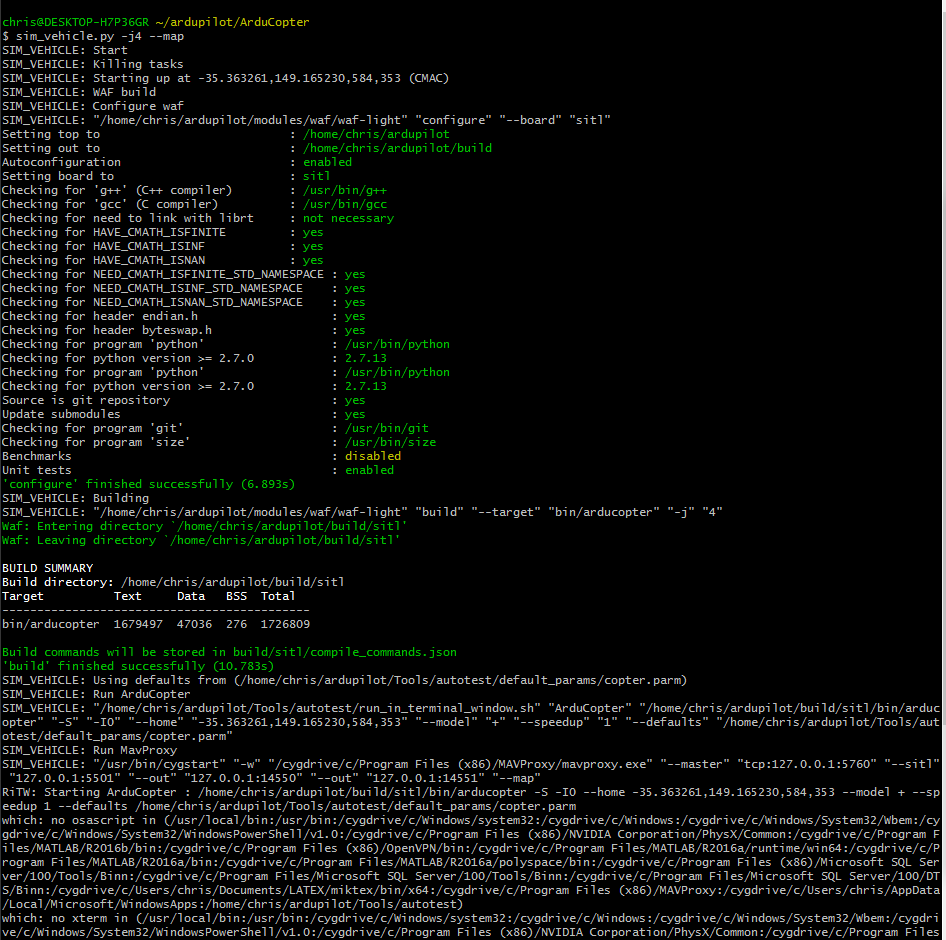
Open Cygwin. (We will build copter)
cd ~/ardupilot/ArduCopter
make sitl -j4
You will build firmware for first time
In order to start SITL with Xplane, move to desired platform (we build copter)
cd ~/ardupilot/ArduCopter
sim_vehicle.py -j4 -D -f xplane-heli --console --map
Now if everything is right, You will see also MAVProxy window
Now start Xplane, once he will be ready, You will see data in MAVProxy.
Now open MP, choose UDP connection and press CONNECT. You will see window promt with 14550 port. Press ok, after that MP will connect to MAVProxy, which is connected to xplane.
Now You can control your copter with MP.
Take a look at the bottom of the wiki, since You need to setup helicopter with two additional requirements.
I installed APM for Mac OSX, then the FTDIUSB SerialDriver.
Then I entered the UDP port in APM Setup.
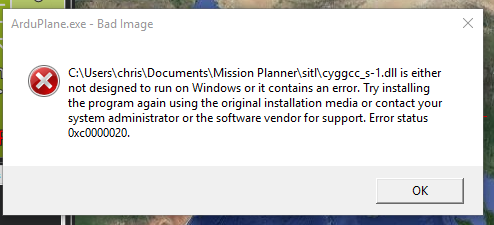
However, I am not connected to X-Plane. I always get the following message:
“Please connect first.”
You might be able to use the XPlaneConnect interface to hook up each throttle output from the MAVLink protocol…? But it requires original work as far as I can tell… in the language of your choice, C, Matlab, Python, etc.
Hi everyone, I Connected Xplane with mission planner but when I give mission in mission planner or other some commands aircraft does not follow mission
can anyone help me Please!!