In another flight I tried a test of the LOITER mode which is of course a pre-requisite for automated hovering. Sure enough the machine toilet-bowled in increasingly violent swirls until it crashed. Ok, now I have a diagnosis.
Mounted the GPS/Compass unit higher up on the frame away from other electronics and re-calibrated in the open field.
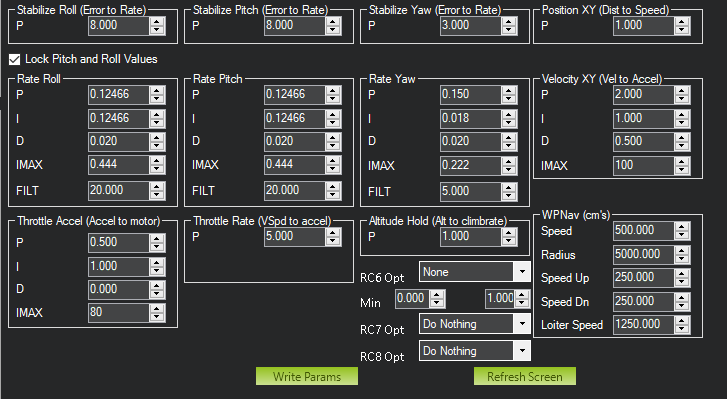
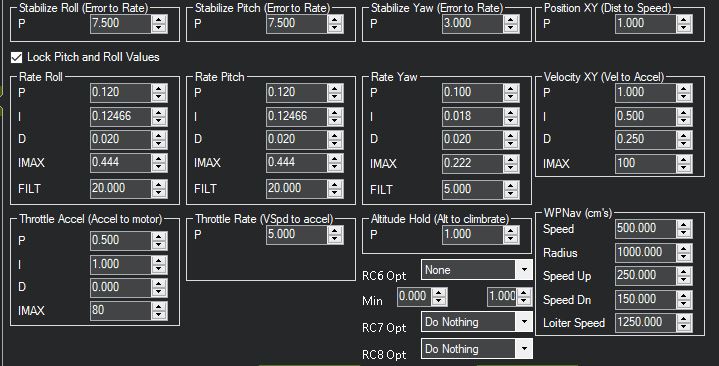
Later I adjusted the PIDs until it actually could remain in control in LOITER mode. Fantastic. I ran out of PID “D” adjustment though as the maximum for pitch and roll seems to be 0.020. Current PIDs attached below. It was getting better each time and I thought a little more D might help.
Tried an automated mission this afternoon. It flew relatively smoothly to the first waypoint 100 feet up and 100 feet out. When it arrived it began to spiral out of control. I had to abort the mission and ditch it. Fortunately there was little damage as it lawn-darted into soft earth.
At this juncture I have to wait and see if any advice comes from this forum. Maybe I have the wrong kind of singlecopter, or maybe I do not have it tuned correctly.
I’m putting the project on hold for now, pending new advice and information. Thank you to Ardupillot and Singlecopter developers and testers. I hope to continue this testing soon.
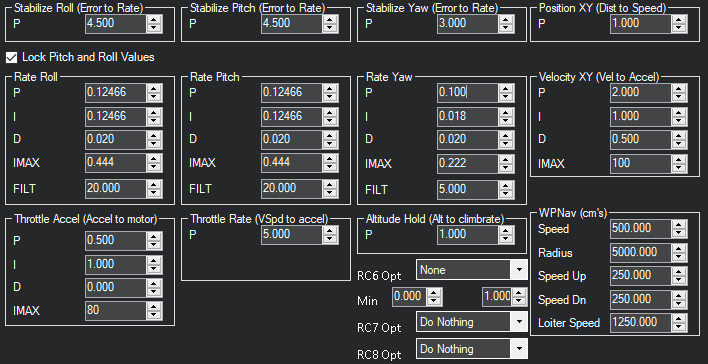
One last try, with PID values lowered. The machine still oscillates constantly in yaw, even with the P values reduced the the limits allowed by SingleCopter.
Have you considered that the oscillations you see might be due to the aerodynamic effect of the control surfaces you are using?
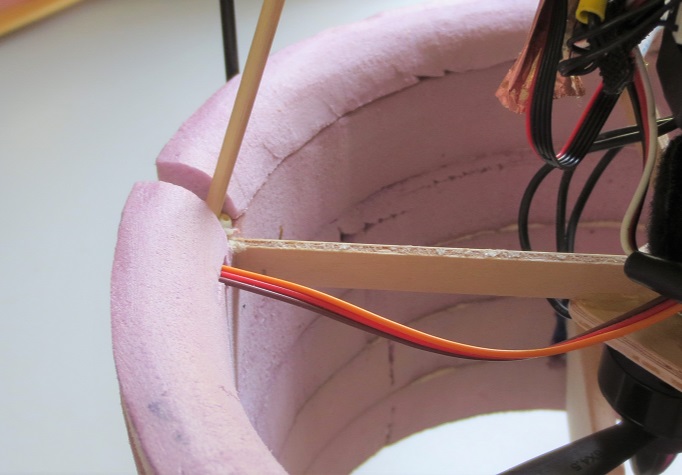
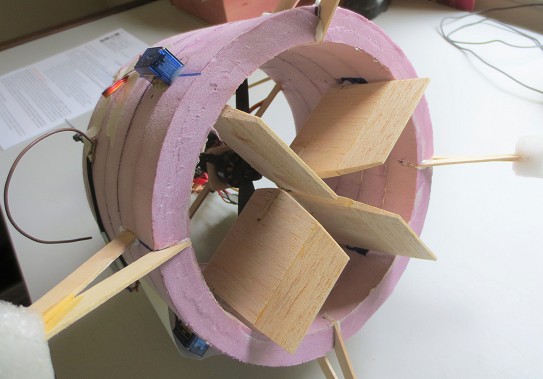
I noticed in a close up pic that the controls are just flat plate with no taper on the trailing edge.
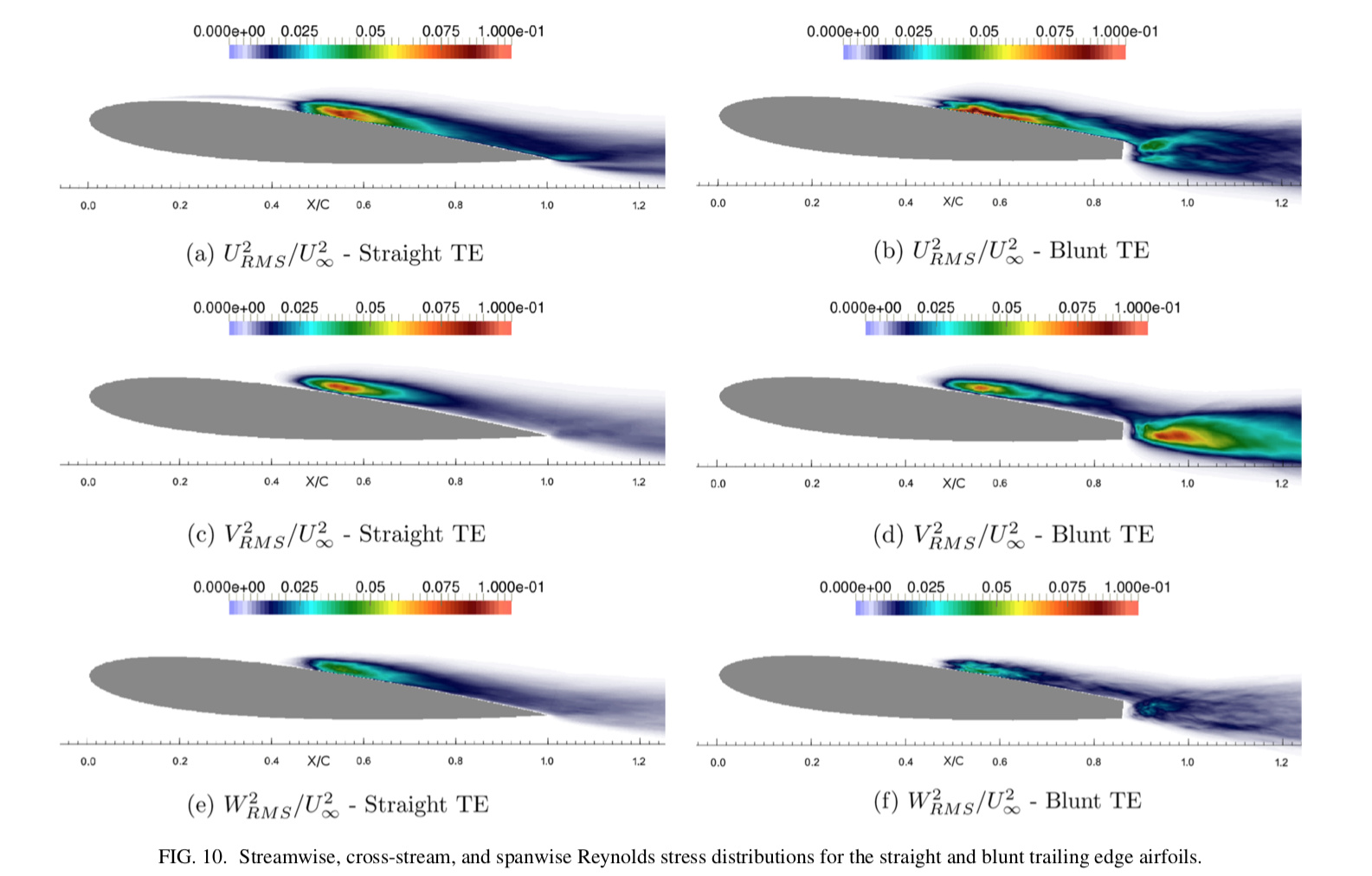
Although this article is looking at serrated trailing edges it does give some good analysis of flat trailing edges.
I know from practice experience that model aircraft with flat plate controls have a tendency to oscillate due to the effects described in the article.
So chasing PID’s as the solution might not have the benefits you expect.
That’s on my list of improvements based on you advice.
The wierd thing is that the machine flew fine with the flat plate fins, and without the oscillations using INAV software.
But at this point I’ll do anything to get it work with SingleCopter.
Now, how to carve down the fins without destroying them. A dremel with a sanding drum perhaps?
Thanks,
Paul
p.s. Going through the paper now. If a serrated, tapered trailing edge is good enough for whales, it’s certainly good enough for me. I think the paper concludes that the blunt trailing edge suffers something called “lock on” under certain conditions. The serrations attenuate the vortices that contribute to this effect, while the sharp trailing edge has less of them in general? I suppose these vortices and lock-on could contribute to fluttering fins? Thanks again Mike, Paul
Considering how the machine oscillated in yaw, I thought that it may be struggling against the torque created by the spinning prop. To address this I added a small amount of tilt on all four fins when in their neutral positions. The tilt was intended to make a force opposite the direction of the torque. Kind of like the way we do with the tail rotor on model helicopters.
Lo and behold in a brief test hop the machine held its position in yaw and most of the oscillations were gone!
This was a very good piece of progress. Will continue testing later.
Successfully flew a small automated mission this evening. There were still brisk breezes and the craft tilted dangerously a few times during flight. However, each time it righted itself and continued on to fly home and land (without tipping over!).
It seems that without the control system having to work so hard to handle the torque, the PIDs can be adjusted with effect again.
Added an aerodynamically smooth inlet to the top of the shroud today.
The test flight showed a surprising amount of additional power, presumably a result of increased duct efficiency. The machine was now able to hover at one-half power.
A side effect of this newly-found power was the return of the oscillating yaw behavior. A couple more degrees of torque-counteracting fin tilt solved the problem.
Learned today why the machine goes out of control when it begins a descent: To descend it has to reduce the throttle. With reduced throttle there’s is less power to stabilize the craft and it tips over.
Having repeatable automated flights now with reliable landings. Wider landing gear legs helped to keep it from tipping over on touch down. A TFmini rangefinder also helped with accurate altitude data for landing.
Also, adjusted the WP_NAVALT_MIN parameter to stop navigating at one meter of altitude. This reduced the tendency for the craft to move sideways while landing, which made it more difficult for the autopilot to detect the landing - and also caused tip-overs. Please see the “How to detect landings and turn off the motor” thread in the Ardcopter 3.6 area.
It’s still working well despite many bumps and bruises. Has many test flights and several crashes but I finally worked out the airframe and the settings and it flies pretty well.
It flies best on days with low winds and low humidity. I’ve got it to fly short automated missions with ArduCopter 3.6.9 and the “SingleCopter” option and a Pixracer. It flies up and out to a waypoint, returns back to another waypoint near the launch location and then autolands.
That is a good news about it flies pretty well.My singlecopter with ArduCopter 3.5.3 does not well.
Is there any different between ArduCopter 3.6.9 and other versions on singlecopter? Would u like to share the log and PID values?
Thanks,
I’ve attached the recent PIDs, DF log and parameters. I don’t think the ArduCopter version makes much difference. On a suggestion from the forum I backed down to 3.6.6 at one point to try something but it did not work any better than the latest version. I typically try to stay with the latest version to make it easier for the ArduCopter creators to troubleshoot.
I performed a lot of test flights with a lot of changes to get the SingleCopter to fly acceptably. In retrospect all of the physical changes to the aircraft were good improvements that I just did not know about in the beginning. Same goes for the parameter changes. Learned a lot about stability and CG, landing descent speeds and sensor behavior from this project. Good luck.