Hello. I realized the previous questions were silly. I only asked questions, not giving any information about my drone. I would like to explain the single copter situation so far and ask for help again.
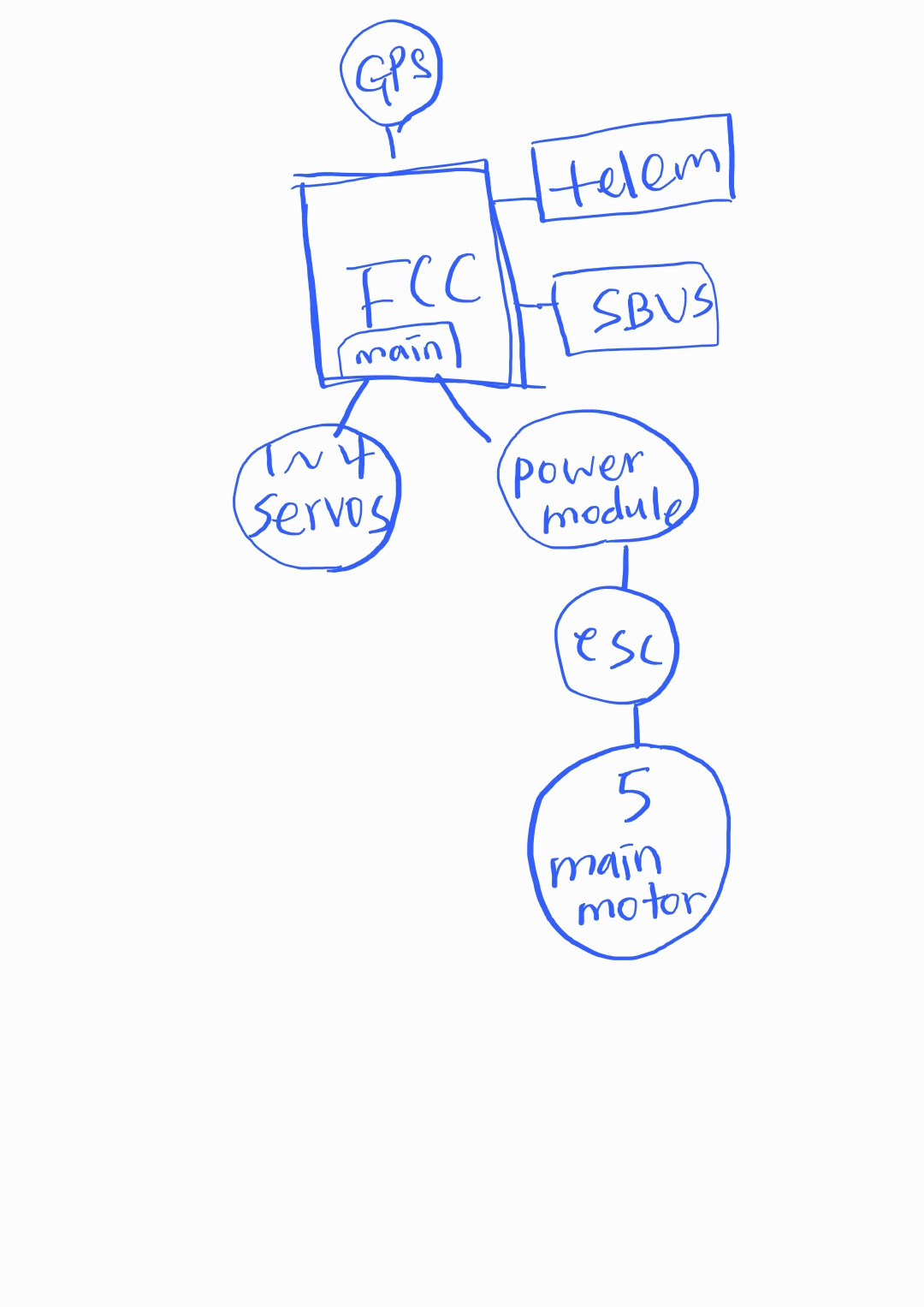
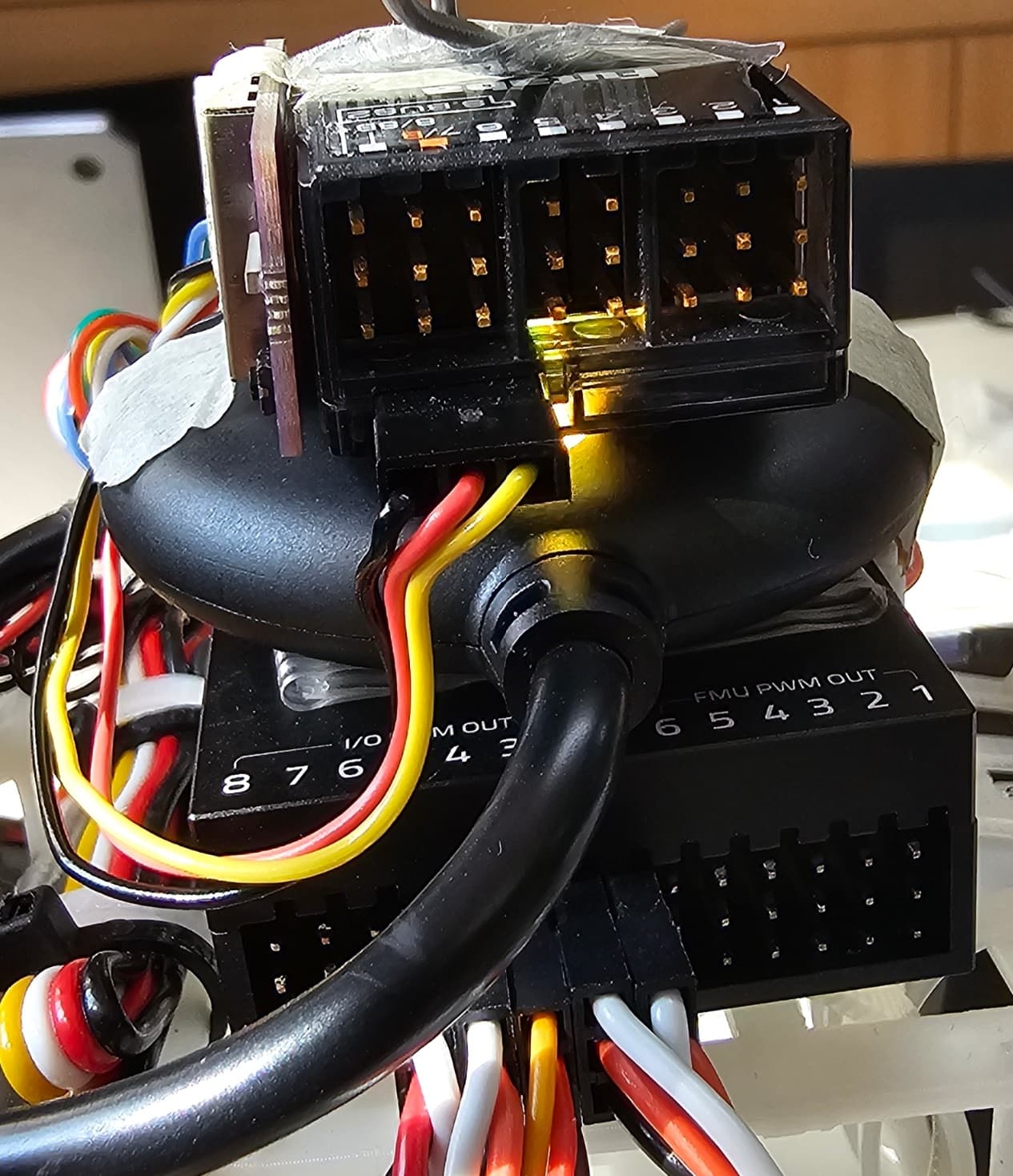
My single copter uses pixhawk 6c mini as fcc. The connection between the four servos and the main motor is as follows. In addition, telemetry, gps, and sbus are connected.
I’m building a drone for the first time besides a simple assembly quadcopter. So it seems like there are quite a few problems I have. And I think there are other people who have similar problems besides me.
-
telemetry - mission planner connect & esc calibration
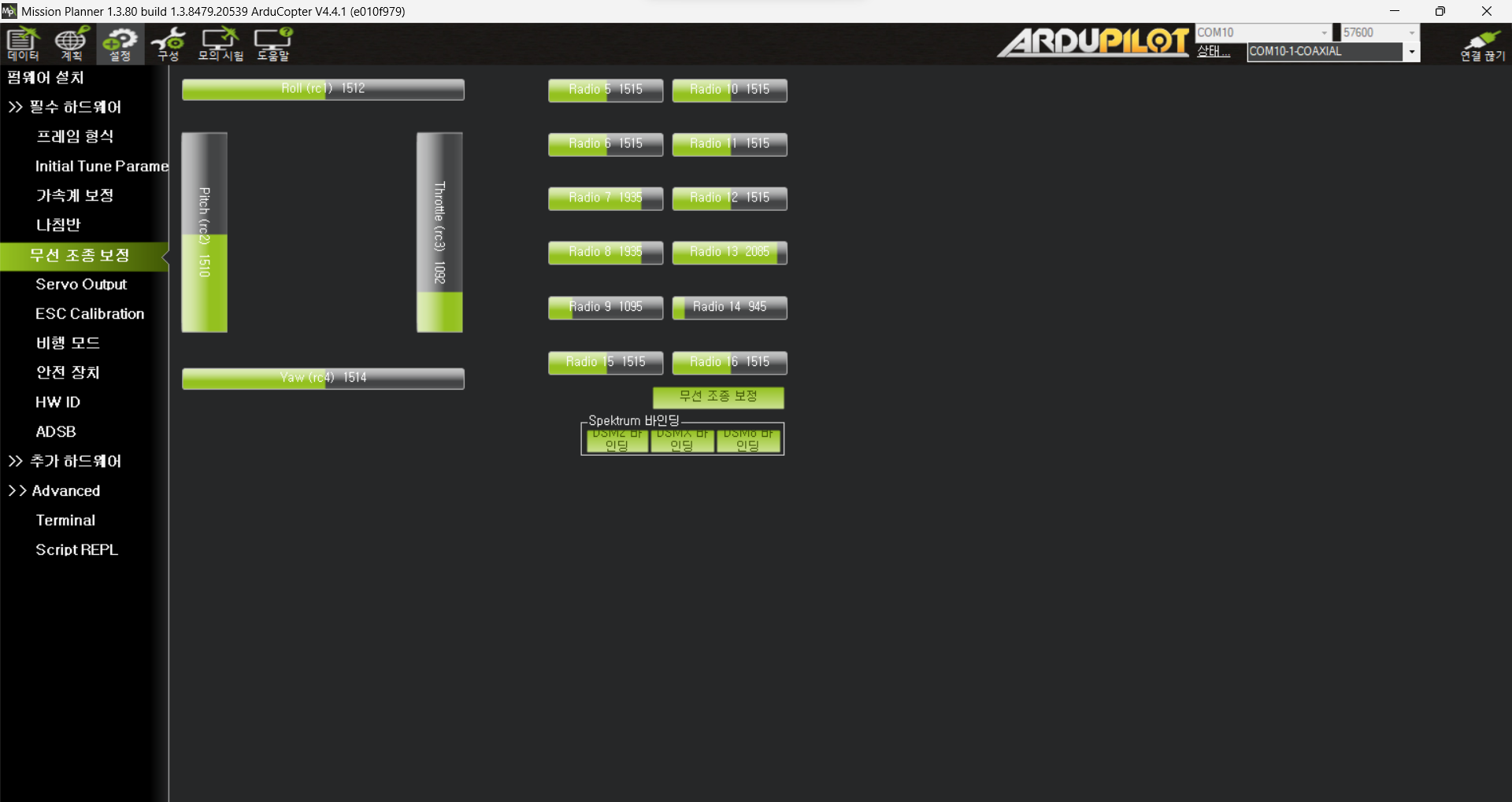
After connecting to the mission planner with telemetry, when esc calibration is performed, the main motor moves according to the rc command, but all flaps do not move. I think mission planner don’t get the rc command. (green bars on rc calibration screen don’t move)
The main motor seems to be moving because of the esc calibration.
Am I misunderstanding mission planner…?
move rc yaw stick but mission planner does not recieve command

servos do not receive rc yaw command
-
telemetry - mission planner connect & esc calibration X
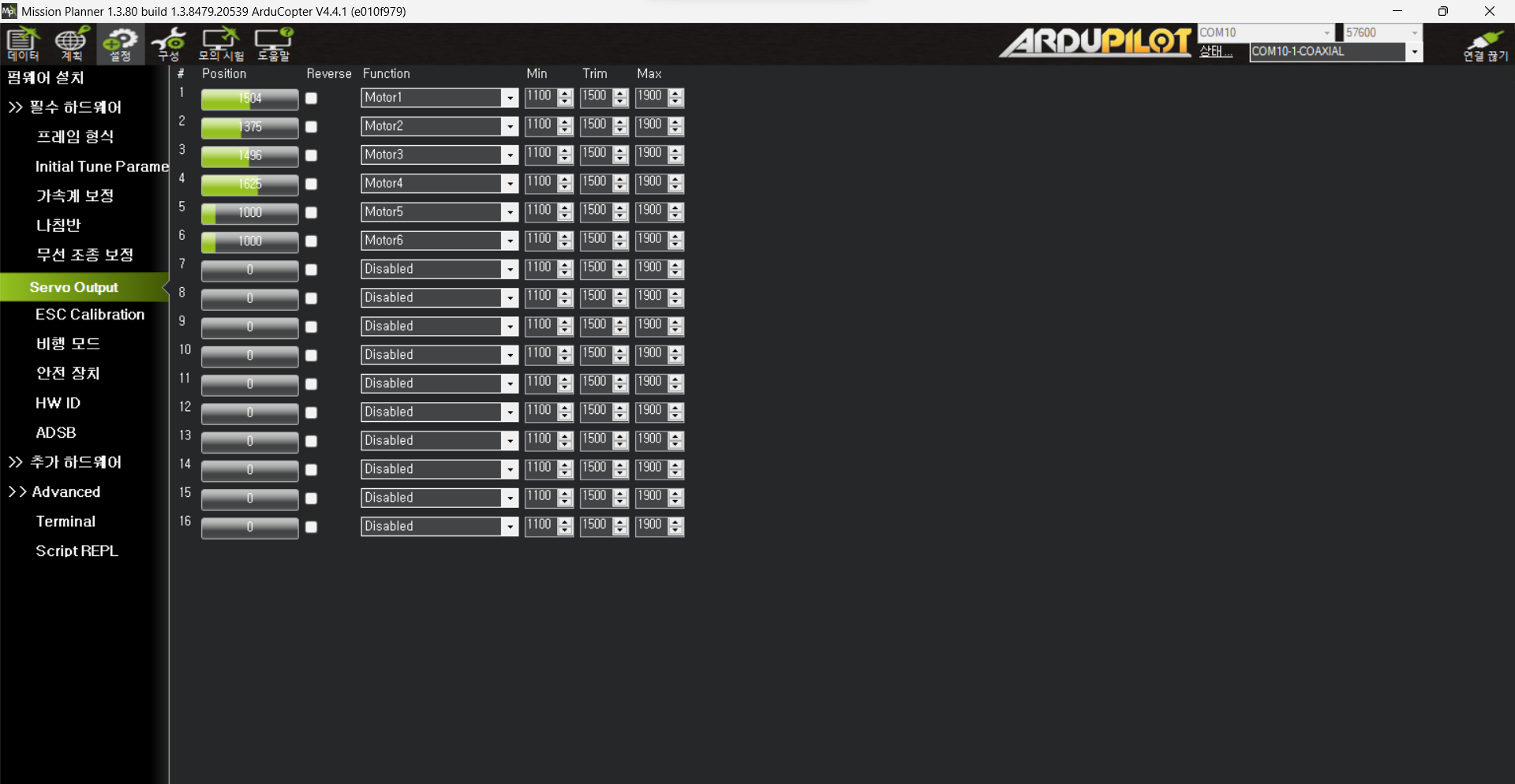
Without esc calibration, rc (or mission planner) can control roll, pitch. But it can’t control yaw. When checking the servo output, servos successfully get rc roll and pitch commands, but do not seem to get rc yaw commands. (When giving the input yaw command, the green bar in servo/motor outputs do not change) However, in the rc calibration screen, the throttle and yaw move properly.
Move yaw stick but no position change
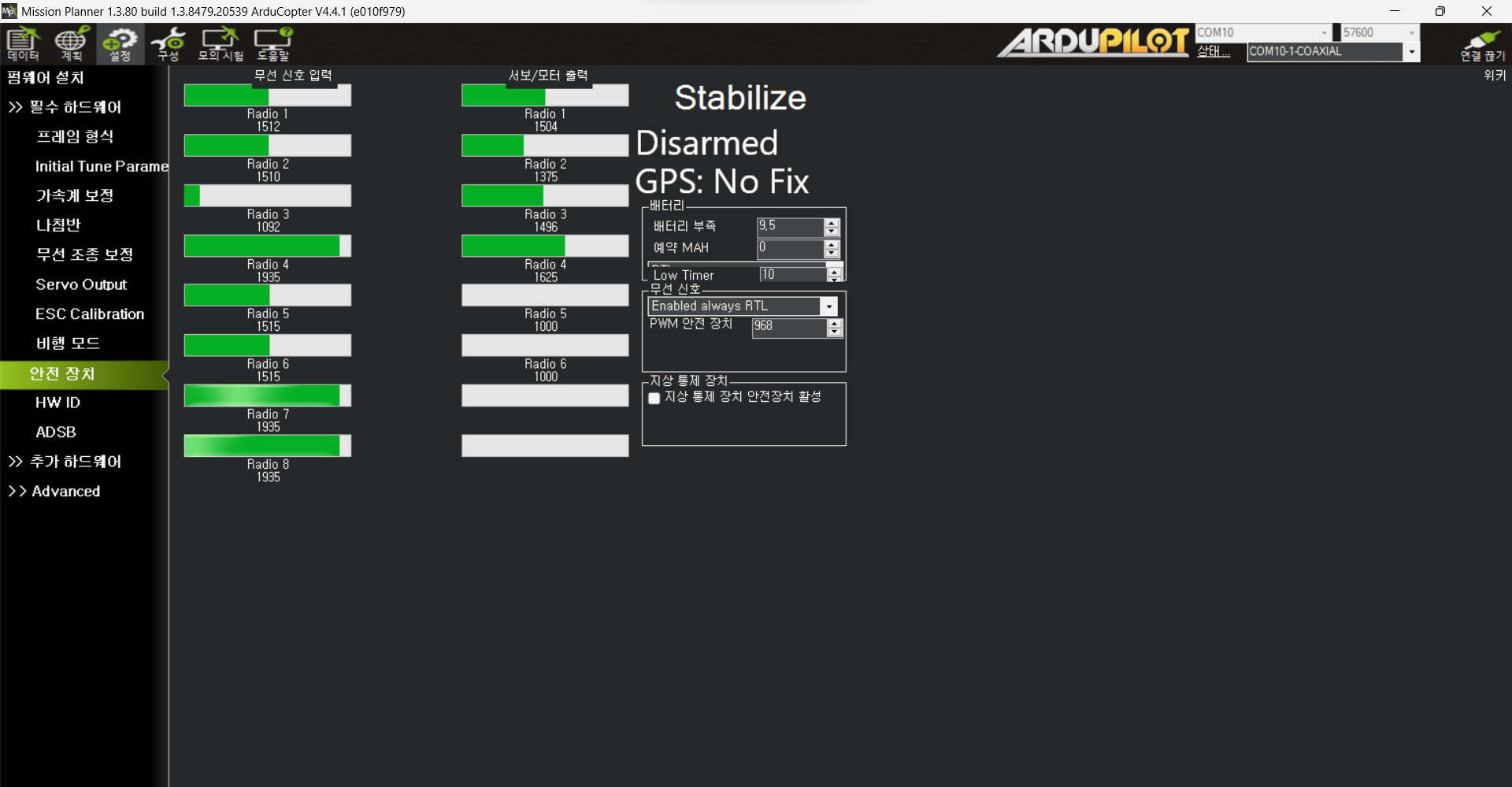
yaw Input but no output

mission planner received rc yaw
this is my drone’s data
param_11_2.param (16.6 KB)
The link below is Google Drive.
https://drive.google.com/drive/folders/1nRSDN8rL0_JIcMoZFBCf-p4dkACOk7nD?usp=drive_link
mp4 & “.bin” files in here.
Given that the roll or pitch is moving properly, it is questionable that yaw does not work properly. I look forward to getting help from someone.
And I’m sorry I don’t know much about single copter.
thank you!