Hi, i need some help please.
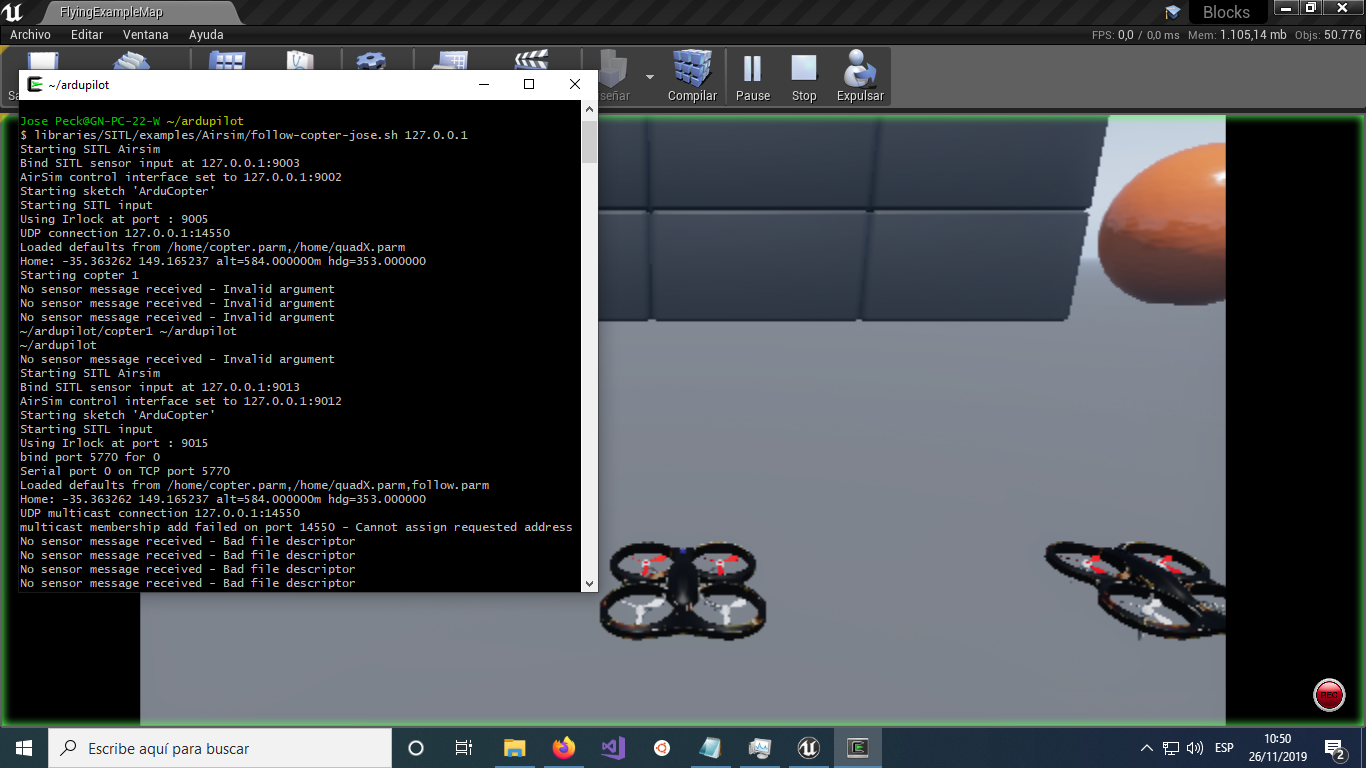
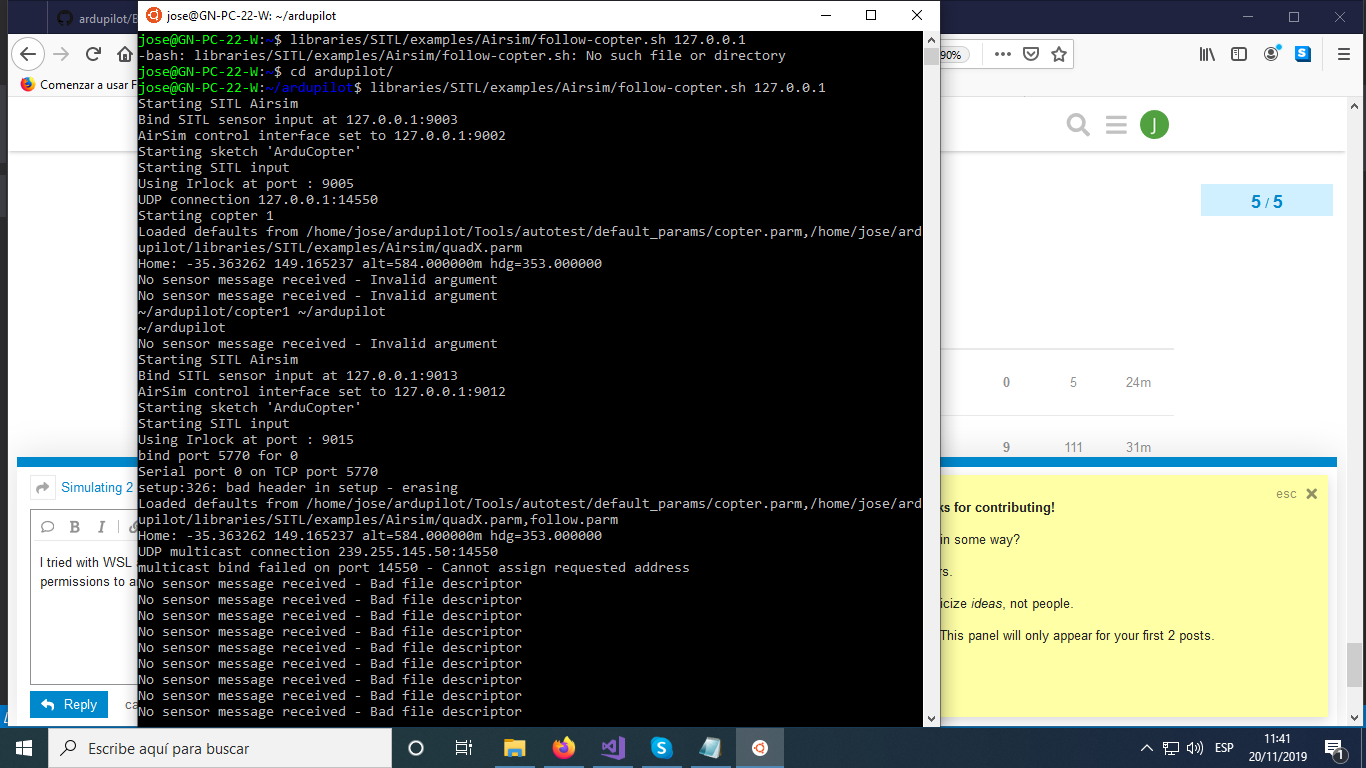
I’m trying to simulate 2 drones as described in the the Ardupilot documentation/simulation http://ardupilot.org/dev/docs/sitl-with-airsim.html . I followed the steps and press play on Airsim, then executed “follow-copter.sh” from “~/ardupilot” directory but it isn’t spawning the 2 drones in Airsim. Everithing seems fine, the waf build is ok and the UDP ports but i get this UDP multicast error and i don’t know how to solve it. (IP shouldn’t be 127.0.0.1??)
I think the problem is that i’m running on Windows10/Cygwin and “follow-copter.sh” was writen for linux (the next step in the documentation is to run “mavproxy.py” to attach MAVproxy but i can`t find this script anywhere in Cygwin). If this is the case, someone should especify this issue in the documentation to not confuse Windows users.
This is what i get when i run $ libraries/SITL/examples/Airsim/follow-copter.sh 127.0.0.1 from ~/ardupilot
Setting top to : /home/Jose Peck/ardupilot
Setting out to : /home/Jose Peck/ardupilot/build
Autoconfiguration : enabled
Setting board to : sitl
Using toolchain : native
Checking for ‘g++’ (C++ compiler) : /usr/bin/g++
Checking for ‘gcc’ (C compiler) : /usr/bin/gcc
Checking for c flags ‘-MMD’ : yes
Checking for cxx flags ‘-MMD’ : yes
Checking for need to link with librt : not necessary
Checking for feenableexcept : no
Checking for HAVE_CMATH_ISFINITE : yes
Checking for HAVE_CMATH_ISINF : yes
Checking for HAVE_CMATH_ISNAN : yes
Checking for NEED_CMATH_ISFINITE_STD_NAMESPACE : yes
Checking for NEED_CMATH_ISINF_STD_NAMESPACE : yes
Checking for NEED_CMATH_ISNAN_STD_NAMESPACE : yes
Checking for header endian.h : yes
Checking for header byteswap.h : yes
Checking for HAVE_MEMRCHR : no
Checking for program ‘python’ : /usr/bin/python
Checking for python version >= 2.7.0 : 2.7.16
Checking for program ‘python’ : /usr/bin/python
Checking for python version >= 2.7.0 : 2.7.16
Source is git repository : yes
Update submodules : yes
Checking for program ‘git’ : /usr/bin/git
Checking for program ‘size’ : /usr/bin/size
Benchmarks : disabled
Unit tests : enabled
Scripting : enabled
Scripting runtime checks : enabled
Checking for program ‘rsync’ : /usr/bin/rsync
‘configure’ finished successfully (14.887s)
Waf: Entering directory /home/Jose Peck/ardupilot/build/sitl' Embedding file sandbox.lua:libraries/AP_Scripting/scripts/sandbox.lua Waf: Leaving directory /home/Jose Peck/ardupilot/build/sitl’
BUILD SUMMARY
Build directory: /home/Jose Peck/ardupilot/build/sitl
Target Text Data BSS Total
bin/arducopter 2642573 82868 416 2725857
Build commands will be stored in build/sitl/compile_commands.json
‘copter’ finished successfully (44.741s)
Starting copter 1
Starting SITL Airsim
Bind SITL sensor input at 127.0.0.1:9003
AirSim control interface set to 127.0.0.1:9002
Starting sketch ‘ArduCopter’
Starting SITL input
Using Irlock at port : 9005
UDP connection 127.0.0.1:14550
Loaded defaults from /home/copter.parm,/home/quadX.parm
UDP multicast connection 239.255.145.50:14550
multicast bind failed on port 14550 - Cannot assign requested address
~/ardupilot/copter1 ~/ardupilot
~/ardupilot
Starting SITL Airsim
Bind SITL sensor input at 127.0.0.1:9013
AirSim control interface set to 127.0.0.1:9012
Starting sketch ‘ArduCopter’
Starting SITL input
Using Irlock at port : 9015
bind port 5770 for 0
Serial port 0 on TCP port 5770
Loaded defaults from /home/copter.parm,/home/quadX.parm,follow.parm
UDP multicast connection 239.255.145.50:14550
multicast bind failed on port 14550 - Cannot assign requested address
This is my Airsim settings.json
{
“SettingsVersion”: 1.2,
“LocalHostIp”: “127.0.0.1”,
“SimMode”: “Multirotor”,
“OriginGeopoint”: {
“Latitude”: -35.363261,
“Longitude”: 149.165230,
“Altitude”: 583
},
“Vehicles”: {
“Copter1”: {
“VehicleType”: “ArduCopter”,
“UseSerial”: false,
“DefaultVehicleState”: “Disarmed”,
“UdpIp”: “127.0.0.1”,
“UdpPort”: 9003,
“SitlPort”: 9002
},
“Copter2”: {
“VehicleType”: “ArduCopter”,
“UseSerial”: false,
“DefaultVehicleState”: “Disarmed”,
“UdpIp”: “127.0.0.1”,
“UdpPort”: 9013,
“SitlPort”: 9012,
“X”: 0,
“Y”: 3,
“Z”: 0
}
}
}
And this is my version of the follow-copter.sh. i made some path modifications because i had a problem reading into a directory with whitespace.
#!/bin/bash
assume we start the script from the root directory
ROOTDIR="$PWD"
COPTER=ardupilot/build/sitl/bin/arducopter.exe
GCS_IP=$1
BASE_DEFAULTS="/home/copter.parm,/home/quadX.parm"
[ -x “$COPTER” ] || {
./waf configure --board sitl
./waf copter
}
start up main rover in the current directory
/home/‘Jose Peck’/ardupilot/build/sitl/bin/arducopter.exe --model airsim-copter --uartA udpclient:$GCS_IP --uartC mcast: --defaults $BASE_DEFAULTS &
now start another copter to follow the first, using
a separate directory to keep the eeprom.bin and logs separate
for increasing the number of copters, change the number in seq
for i in $(seq 1); do
echo “Starting copter $i”
mkdir -p copter$i
SYSID=$(expr $i + 1)
FOLL_SYSID=$(expr $SYSID - 1)
# create default parameter file for the follower
cat <<EOF > copter$i/follow.parm
SYSID_THISMAV $SYSID
FOLL_ENABLE 1
FOLL_OFS_X -5
FOLL_OFS_TYPE 1
FOLL_SYSID $FOLL_SYSID
FOLL_DIST_MAX 1000
EOF
pushd copter$i
/home/‘Jose Peck’/ardupilot/build/sitl/bin/arducopter.exe --model airsim-copter --uartA tcp:0 --uartC mcast: --instance $i --defaults $BASE_DEFAULTS,follow.parm &
popd
done
wait




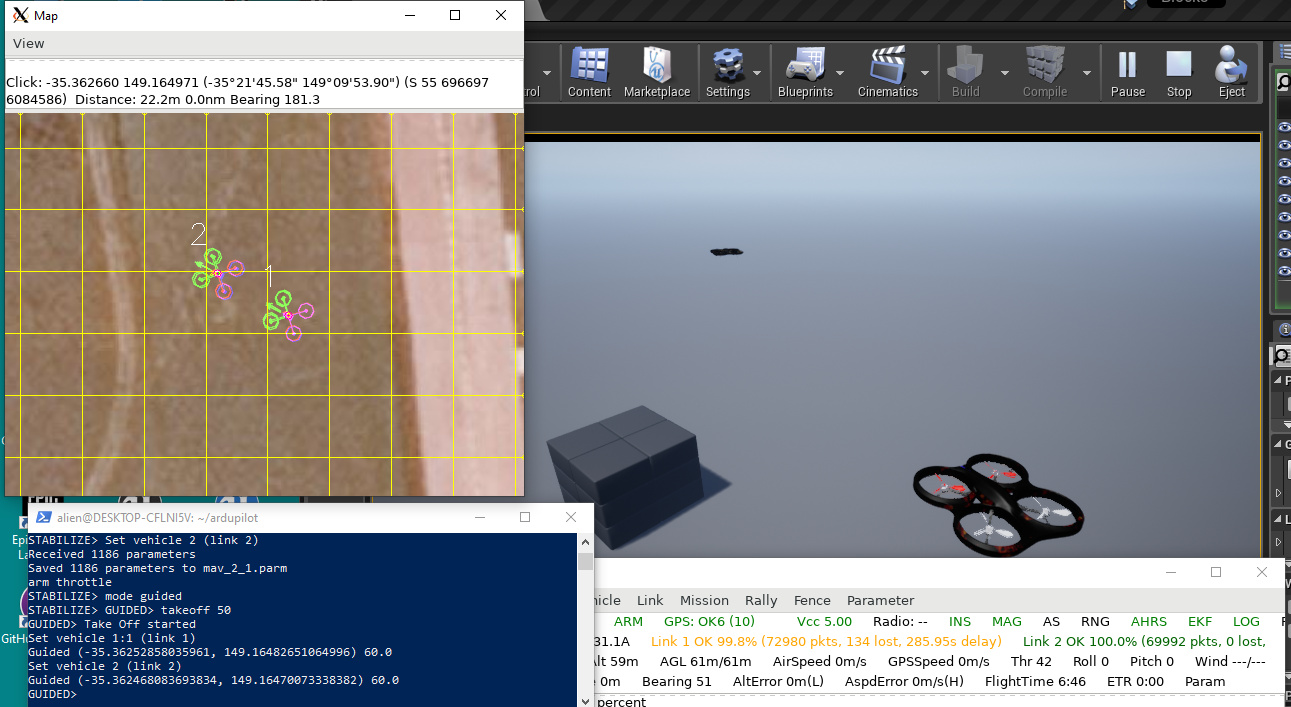
 (through connecting them one by one in MissionPlanner). Now i’m trying to attach mavproxy as the doc webpage suggests but I get an ‘X display’ error and the console nor the map are showing. Do you know what this might be
(through connecting them one by one in MissionPlanner). Now i’m trying to attach mavproxy as the doc webpage suggests but I get an ‘X display’ error and the console nor the map are showing. Do you know what this might be