I never got mine to work, my psychiatrist told me I should stop trying. I’d love to see your settings of you manage to get it going again. Best of luck.
heh … my wife told me get some other job… but it is fustraiting to see how whit newer fw some thing are not working as they ware whit old ones …
I get AHRS ok ;GPS ok; RC ok; but control NO ,
there is no visual hardbeat on gimbal controler board …
actualy It is working whit single wire,( mavlink tx form px) , perhapse that is reason for control no
I got it workinggggg …
Can you do is a huge favour and post some screen shots of the basecam settings? I’ll give it another go. What was the issue in the end?
sorry for waiting ,
I think I have made wrong connection for mavlink rx on First atempt,
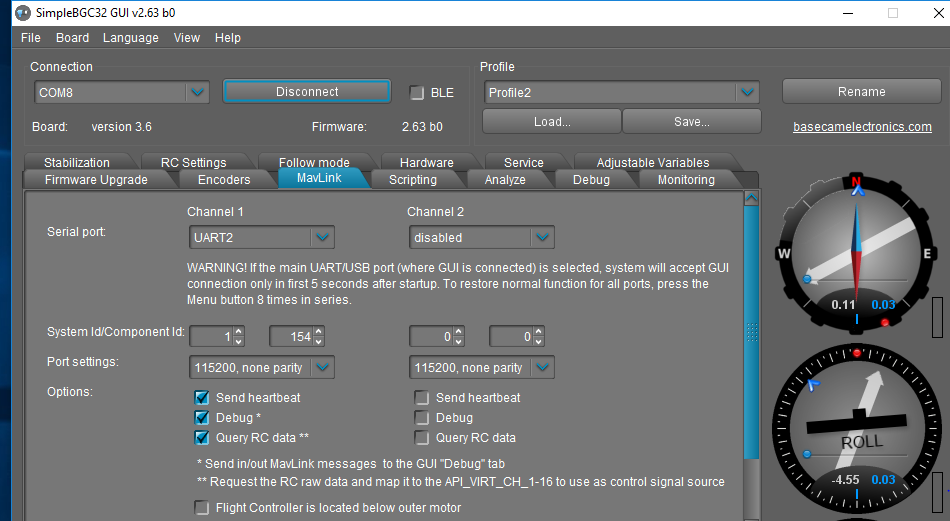
so now this is how it is all working ,

That’s brilliant Danijel. I’ll have a go this week
I am shure you will be sucessfull
this days I will give my best to try mavlink on tiny board w encoders…
Haha now I’m totally confused, those yellow, blue and white cables are plugged into fc_roll, fc_pitch and AUX1 respectively.
So that’s AUX for one way mavlink connection? Surely not using FC_roll/pitch ??? never heard that mentioned.
Nope still nothing!!
Here’s my complete setup
without pins I’ve connected to as I’ve tried them all.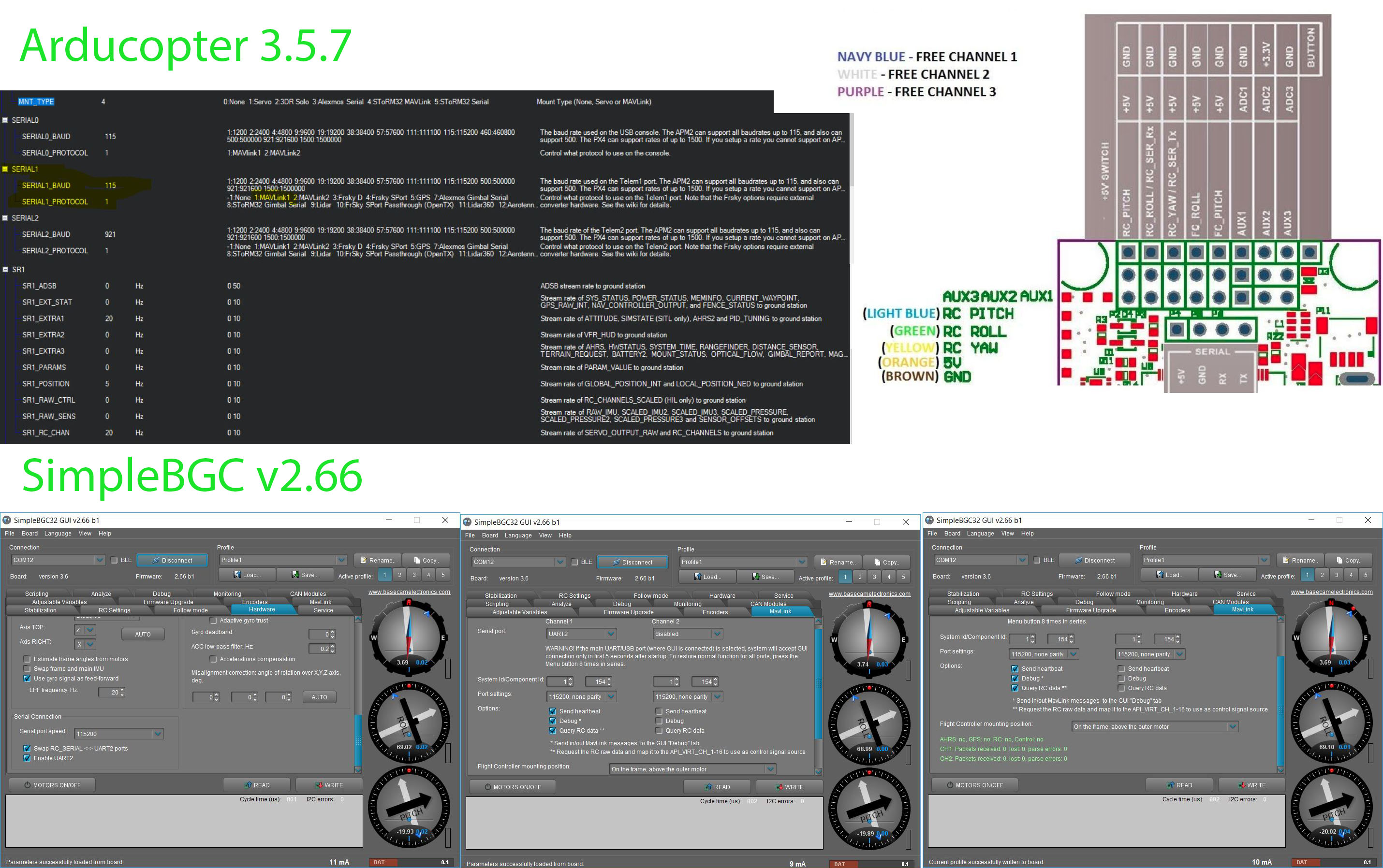
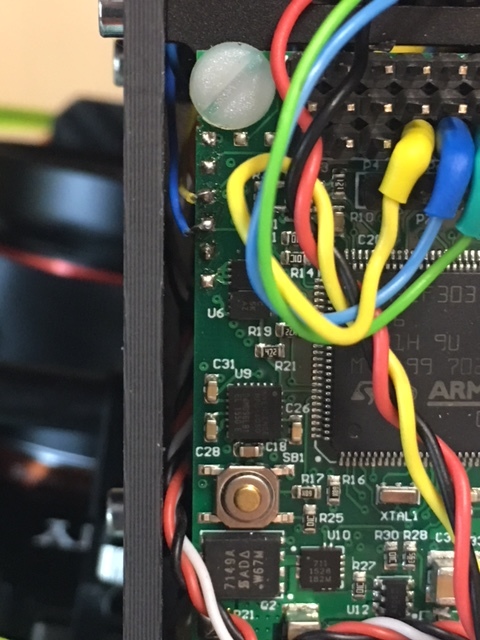
ok , lets do this one more time …
put mavlink tx on RC YAW (on mine picture blue wire directly soldern on board )
put mavlink rx on RC ROLL (on mine picture yellow wire directly soldern on board)
set telemetry port to 115 , protocol mavlink 1 , choose storm32 on gimbal page of MP optional hardware , set mnt_rc_in_roll to some chanel , do the same for tilt and pan …
please check BRD_SER(PORT NO:)_RTSCTS
disrigard all other wires …
Sigh,checked double checked. brd_ser2_rtscts:0. Nothing, I reset every time. I’m guessing the the simple bgs will just pickup the mavlink connection in the green lines on the mavlink tab, at one point i got 512 packets received but don’t know how or when. It could be working but the gui doesn’t show it??
I’ve sent an email to Jakub at hdair studio and see what he says.
Tried three different firmwares. Tired.
Thanks again for your help Danijel!
On the other hand I added a bluetooth adapter via the serial port which was a doddle comparatively. Using the Basecam android app is great. The control mode is pretty, gimbal follows you phone direction, actually very impressive.
I am looking around how to connect tiny board to mavlink , since it has no rc roll input witch I have used for mavlink tx , can I asumme I could just plug mavlink tx an rx to tiny board TX and RX pins that are specified as uart to bluetooth…
I was thinking of using the serial port for fc mavlink. But for some reason in the literature is not mentioned as another channel for mavlink, or as a uart port. It’s buad rate is 11500 by default so good there. The simple BGC manual is pretty good. It says the tiny has rc_roll and Rx on the same pin. Surely it has rc_roll? Simple bgc_32bit_manual page 38
Hi Iam trying to connect alexmoss board via gps2 port (telemetry4) on pixhawk 2.1 (cube) Anyone knows why I don’t have sr4 and sr5 parameters in missionplanner ? They don’t exist in mission planner 