I am slowly building a quad. Today was the maiden flight and autotune. The next step is installing a camera and gimbal. It’s also where I’m having trouble.
The wiki page says to connect to Telem2. But my problem is that I’m already using both telemetry ports. I have a SiK telemetry radio on Telem1 and a PRM-03 module on Telem2.
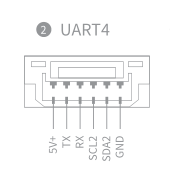
Can I use a different port? (Like UART4?) Should I try to solder a split into the wires coming from Telem1 and try to connect the SiK radio and the PRM-03 both to the same port?
I’m getting pretty comfortable with soldering, but I don’t know if two pieces of hardware will play nice together on one port. But I’m not sure if I can actually use a UART port in place of a telemetry port. It has the same number of pins and +5V, Ground, Tx, and Rx are all in the same locations.
But instead of “RTS” and “CTS” like the telemetry ports, UART4 has “SCL2” and “SDA2.” I don’t know what those are, but the Flight Controller doesn’t appear to use them as those pins are left empty on the connector port. Only +5V, Ground, Tx, and Rx are used.
How should I proceed? UART4? Make a split cable? Something else?
Thanks in advance.
any uart will work doesn’t have to be the one in wiki thats just the one they used for the example. do not splice anything. you can also look at using a CAN node for some items that may be serial if you eventually run out of serial(uart) ports
yes you can do exactly that just sub in what port you are hooking it to. there has been some pretty big changes with the way gimbals interact with the flight controller but that should not effect how its hooked up.
I followed the instructions but there is a problem. I cannot control pitch from my RC.
I wanted to set the variable MNT1_TYPE to 3 but in my parameter list there is no MNT1_TYPE. There is only MNT_TYPE. I set it to 3. Was that correct? Or, is there a way to get MNT1_TYPE to show up?
On the gimbal setup page I set the Type to “Alexmos Serial” but I don’t know which servo to set the gimbal to. Next to Tilt there’s a pulldown menu with Disable, SERVO1, SERVO2, … SERVO14. I can’t assign an input channel if I don’t set a servo number. Should I go down the list and try every one?
Update: Setting it to SERVO1 caused motor1 to not spin. So I guess I’ll start at SERVO5
I have just updated my firmware. Sorry about that. Thank you for taking the time to look at my look at my parameters. Sorry to have wasted your time with the out of date version.
Edit: There’s an MNT1_TYPE Parameter now! Neato!
Edit2: It looks like the parameters from firmware 4.2 copied over to 4.33. But the gimbal still isn’t controllable by the RC. And the “Gimbal Type” pulldown menu under Optional Hardware under Setup is no longer selectable. Is this progress?
It’s progress for Ardupilot but not yet enough progress for Mission Planner. Because there are now 2 Mounts configurable this menu is broken until it’s fixed, who knows when. You will have to use the Full Parameters List for some configuration settings.
Do you know which other parameters I need to set that I haven’t yet?
MNT1_TYPE is set to 3
SERIAL4_PROTOCOL is set to 7
SERIAL4_BAUD is set to 115
BRD_SER4_RTSCTS does not exist on my mission planner. The wiki says serial 4/5 never uses flow control.
BRD_SER1_RTSCTS, BRD_SER2_RTSCTS, BRD_SER5_RTSCTS are set to 2.
I’m using the full parameters list but I don’t think I’ve changed enough values. The pitch axis on the gimbal still isn’t controlled by the RC.
It says to set SERVO10_FUNCTION to 7
Is that for controlling the gimbal like a servo though? I’m not changing that setting unless someone says to. I don’t know what I’m doing.
I just thought of something. Is it possible that the problem is in a setting in the BGC GUI software? Should I be using PWM? Analog? PPM-Sum? The default is PWM. Is that the correct setting?
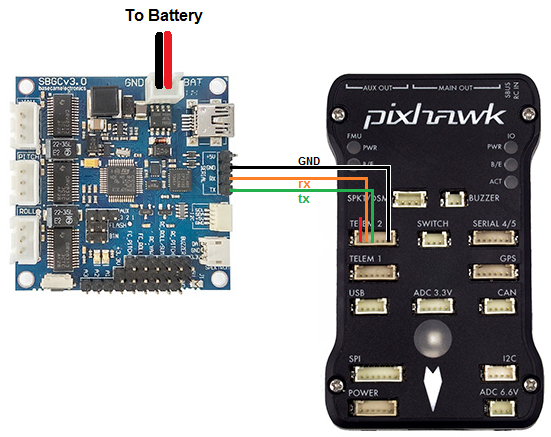
According to the post at Simple BGC gimbal control and 3.6 - #5 by Vince_Hogg, the Tx and Rx pins might need to be switched? I have the Tx from UART4 going to the Rx on the gimbal controller, and the Rx from UART4 going to the Tx on the gimbal. Is it supposed to be backwards, like Rx to Rx and Tx to Tx?
Also did I post this in the wrong forum? I see there’s a osd/video forum, but it contains some gimbal discussion as well. Am I in the wrong place?
The +5V pin from the telemetry port isn’t connected. I had assumed this was an oversight. Now I think I might have made an error.
If the 5V pin is connected, would it cause the gimbal to not work with the flight controller?
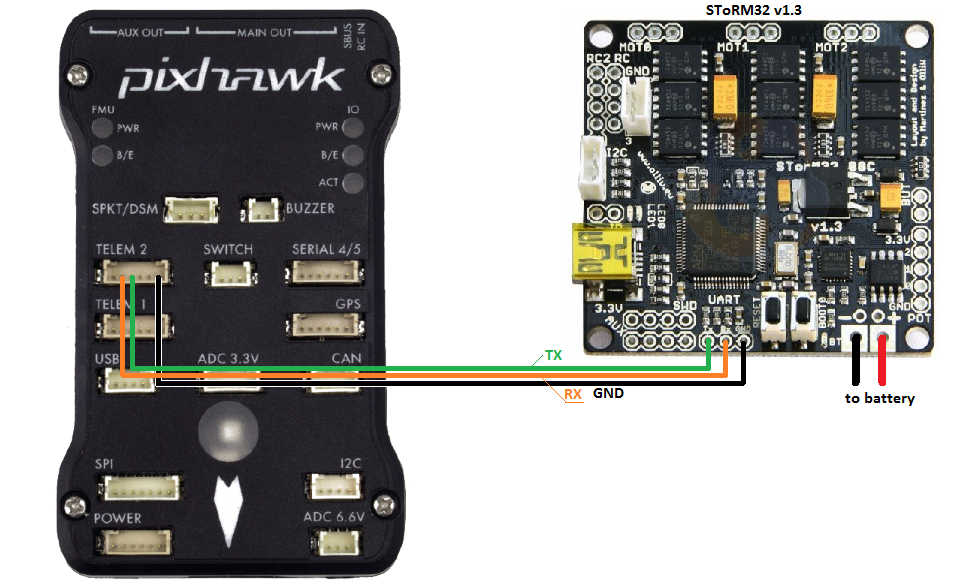
Because I noticed on the wiki page for the SToRM32 gimbal controller that the +5V pin also isn’t connected. The article in fact specifically mentions not to connect it.
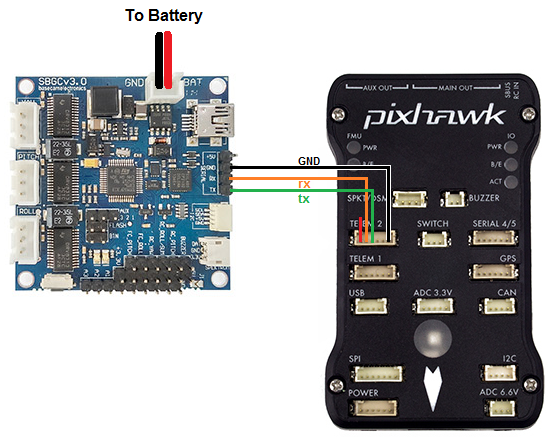
At the top middle of this board, there are some pads labelled “RX,” “TX”, “+5V” and “GND”. The group is not labelled “UART.” But is it?
The gimbal is the same as this one: https://www.aliexpress.com/item/32584473269.html
If not, what about the pins at the top left labeled “FC_ROLL,” "FC_PITCH, “RX_ROLL,” “RX_PITCH”? Can they be used to control the gimbal, like a servo gimbal?
Again, I really appreciate all the help. I couldn’t do this without you.


{kind=link}