A Simple DIY Portable RTK Base Station
I have been learning about RTK GPS and recently wrote a page for the wiki on how to setup and use a Fixed Baseline RTK reference base station to
send RTCM corrections to a vehicle’s GPS (see: RTK GPS Correction (Fixed Baseline) — Plane documentation). But exposing my laptop to Austin’s 100F temperatures (since the RTK GPS is attached to the PC to send Base corrections thru Mission Planner to the vehicle via telemetry) did not seem a good setup, especially since I usually do not use a PC for GCS anyway, but rather rely on OpenTX and/or QGC on my phone.
So I wanted a small, self contained RTK base station. This is the result:
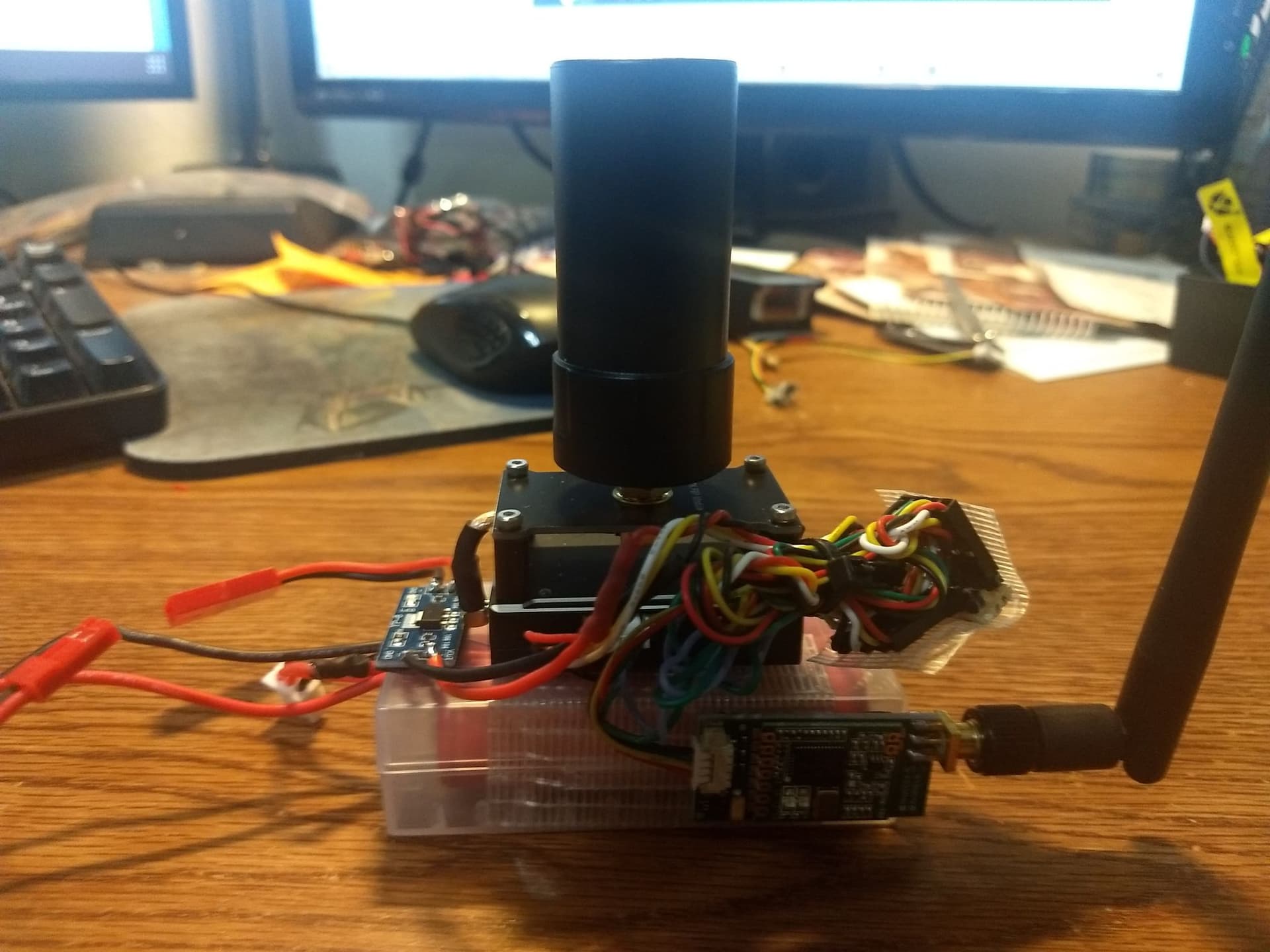
It sends the RTK corrections via Sik radio link directly the to vehicle’s RTK GPS, rather than thru Mission Planner and is very portable. With one exception, it allows one to setup an RTK Fixed Baseline station and have it update the vehicle’s GPS with RTCM corrections without having to use a PC running Mission Planner at the field.
The exception is that, without modification, the portable base cannot “survey” itself in at a new location automatically, which is required for it to send valid RTCM corrections to the Rover or Vehicle. So, if the base station location changes, you must attach it to a PC and use the Ublox U-Center application to have the survey-in process restarted. Its still an improvement by not having to have the PC out in the sun adjacent to the base RTK GPS unit. However, if one removes the backup batteries on the base unit GPS such that it “cold” starts every power up, the Base GPS can start a new survey-in automatically. I am also exploring the possible use of the F9P GPS module’s RESET_N to get the same cold start effect, which would allow and GPS OEM to cheaply add the ability to build a unit that works with warm/hot starts as is now the case, but also allow forcing a “cold” start if desired, as in this application. Will update as this gets tested.
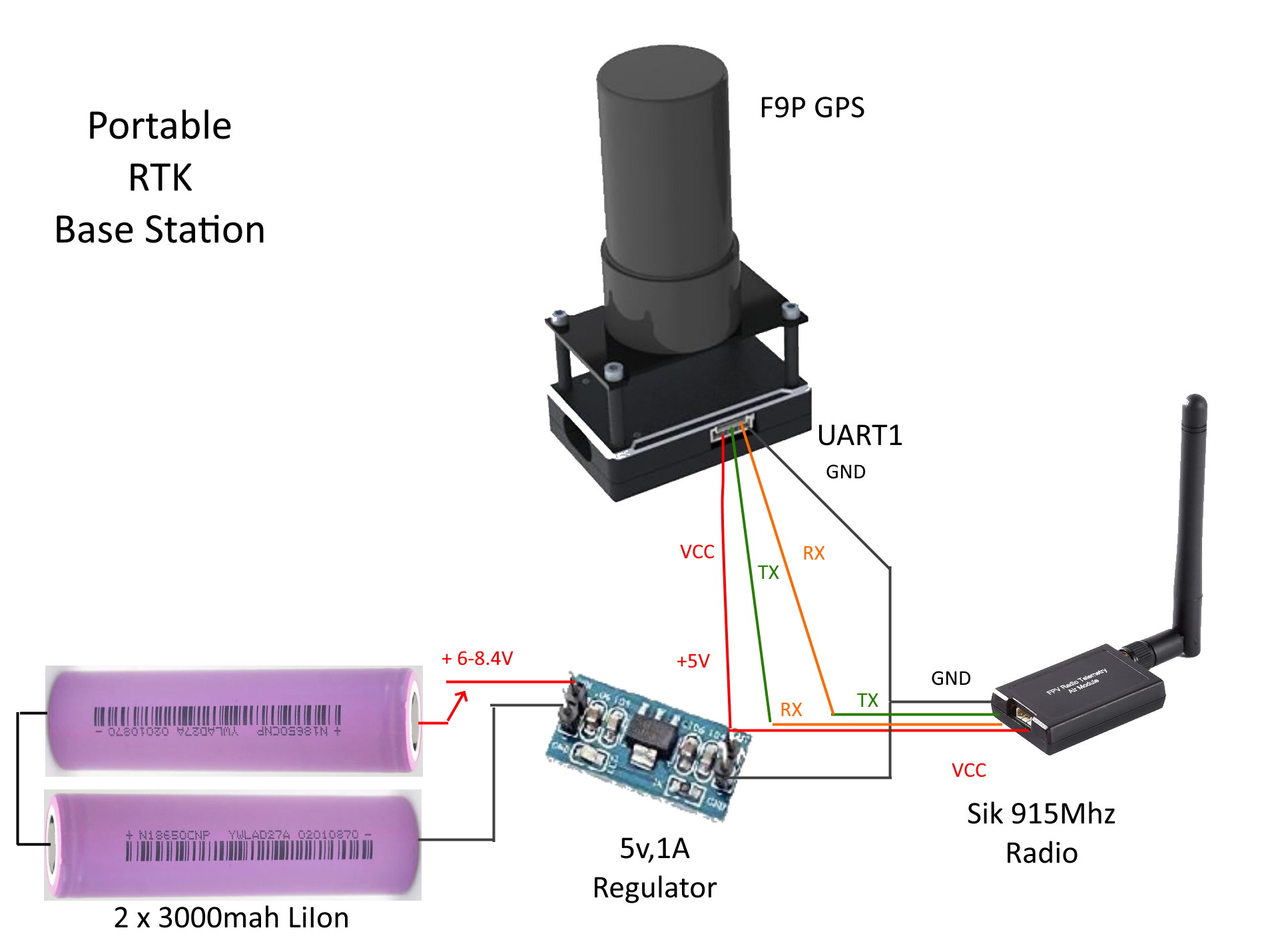
System Configuration
(the system below uses the QioTek F9P GPS/Compass modules)
if you are not familiar with UBLOX U-Center app, watch some tutorials on the web. U-Center has many views and features, but for this exercise, you only need to:
- Attach a USB cable to the unit
- Start U-Center and on the Receiver tab, select the Connection for the USB COM port that appears, baudrate is unimportant.
- Under View tab, select the Configuration view to set the parameters below for the Base and Rover(Vehicle) units.
Base:
Attach USB to the unit, start the UBLOX U-Center app, connect, and in the U-Center configuration view, set:
- PRT: UART1, 57600 baud, RCTM3 out, UBX in…press send button in lower left
- TMODE3: Survey-in, 60seconds, 2 meters…press send
- MSG: RTCM3.3 - 1005, UART1 in/out, 1sec…press send
RTCM3.3 - 1074, UART1 in/out, 1sec…press send
RTCM3.3 - 1084, UART1 in/out, 1sec…press send
RTCM3.3 - 1094, UART1 in/out, 1sec…press send
RTCM3.3 - 1124, UART1 in/out, 1sec…press send
RTCM3.3 - 1230, UART1 in/out, 5sec…press send - CFG: Save current configuration to FLASH…press send
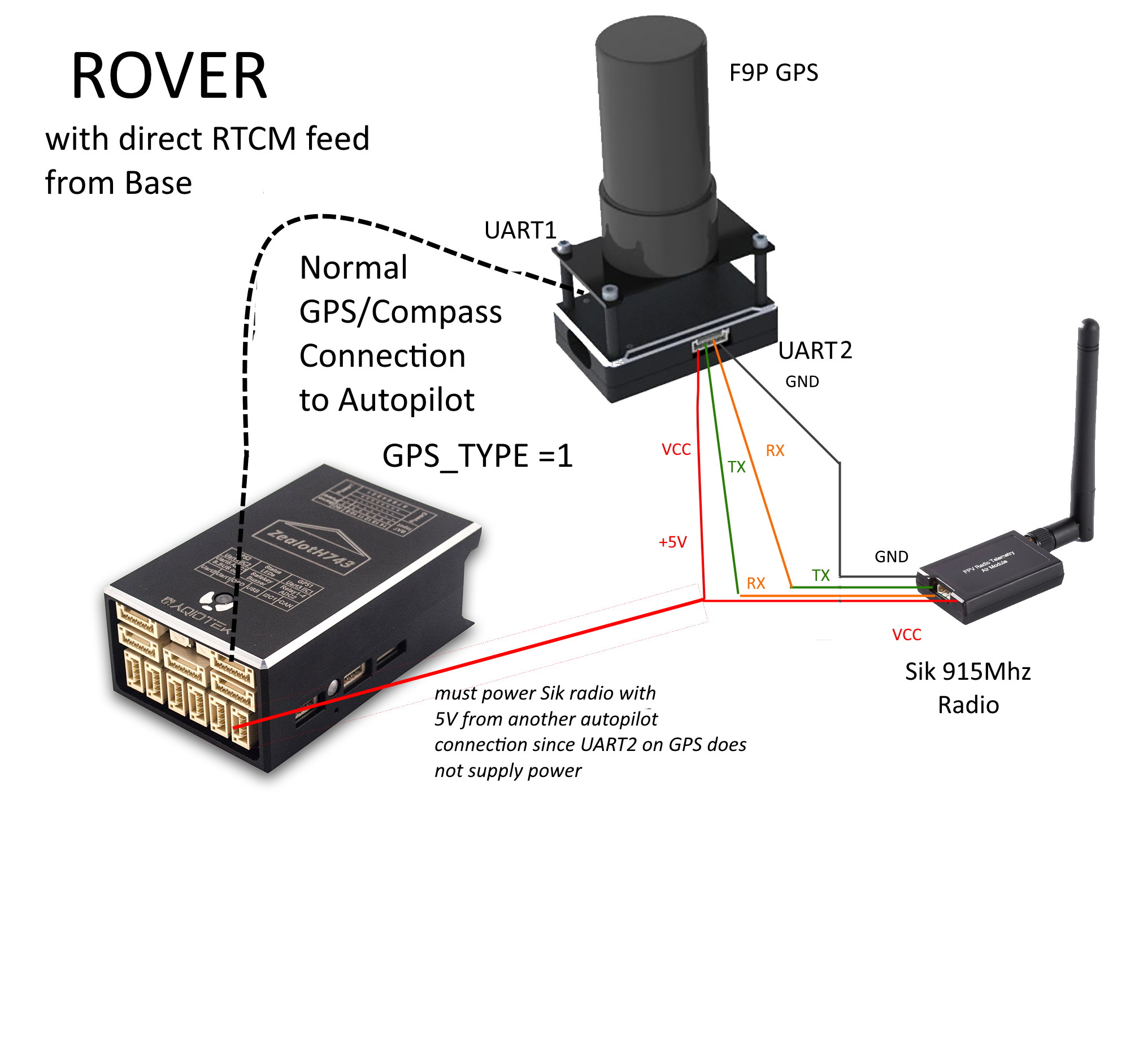
for the Rover unit, attach USB and use U-Center to set:
- PRT: UART2, 57600Kbaud, RCTM3 in, UBX out…press send
- CFG: Save current configuration to FLASH…press send
set GPS_TYPE=1 in ArduPilot…do not set GPS to any moving base types or configuration will be changed and not work
when you power the base unit, it will take it 30 seconds for the unit to acquire lock and start the survey process…for the above survey params (60s of <2m radius survey points), it will take 5-10 minutes to finish the survey assuming clear sky view. During the survey process the Rover unit will flash its RTCM led and assuming the Rover unit has good satellite acquisition, it will move its FIX status from the normal 3D or 3D/DGNSS to “RTKfloat”. Once the survey at the BASE completes, it will move to full precision and report as “RTKfixed” status, if a GCS is monitoring.
without modifying the base GPS to remove its backup batteries, you will either have to let the unit drain its battery backup (a few days to sometimes a week), or use U-Center to configure the TMODE3 to change slightlly one of the params (add a second, for example) and press send to re-start the survey. You can disconnect it from power and then position it later to its location, and repower, and the survey will continue and ultimately complete.
