I found the simple avoidance of altitude hold mode doesn’t work during simulation.I try to push the copter toward the fence at a certain speed,but it didn’t work.And then i try to fly the copter approach the fence,and try to use inertia to fly into the fence,but it also didn’t work.It is described as below in copter introduction.
“In ALTHOLD mode, the aggregate threat is translated into an attempt to add lean input into the pilot’s commands to move the Copter away from the aggregate obstructions. The pilot can still overcome these additions to his command inputs and fly into a object, if determined to do so.”
But i don’t think there is an attempt to do that.
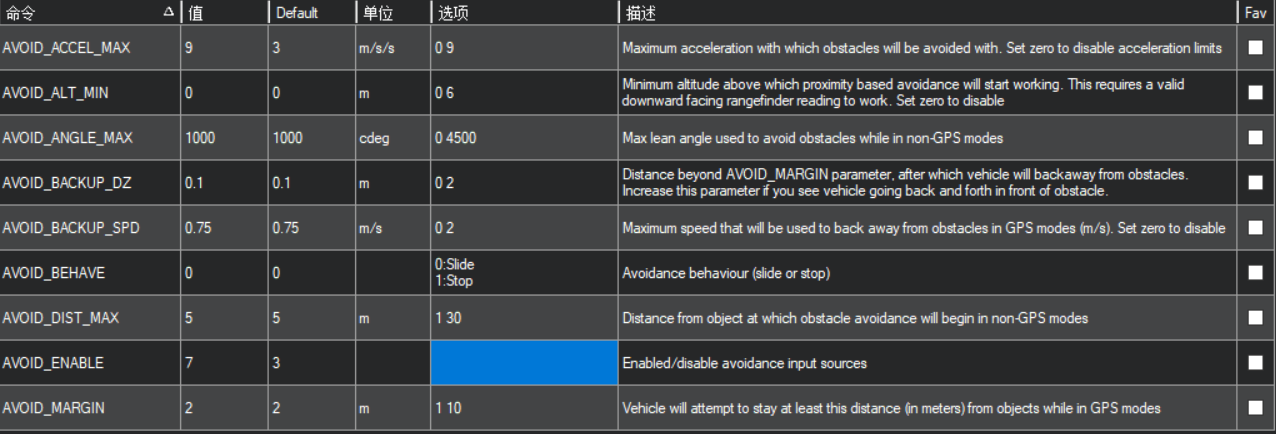
My parameters are as follows.