I am seeing a variety of information on what inputs need to be reversed, and doing it in the software vs in the remote etc.
I am starting with a fresh install of 3.2.1, and would like to take care of this BEFORE testing to see if it flips over mid flight. I dont have an intuitive sense of how the rotors should be behaving.
I have an APM 2.6 and a DX6 transmitter.
If there is an always true answer, that would be great or a reference to where to find more info on understanding this. This page talks about it some:
Ok, can anyone tell me if there is a done community that is willing to support beginner questions? Both of questions have been ignored - are they just too simple or too dumb?
Egging up after less than 24h is a bit harsh.
All you need to know is in the Wiki.
As far as reversing goes, it depends on the radio gear you are using and how it is configured.
All your setup should be done with props off and this stage is where you check the stick directions, which is what I think you are asking.
So get it set for flight, no props, and arm.
Raise the throttle a little so it won’t auto disarm.
Move the roll stick right and the left motors should speed up and the right motors slow down.
Move the pitch stick forward and the rear motors should speed up and the front motors slow down.
Simple as that.
thanks Mike that is super helpful! There is just so much to learn all at once.
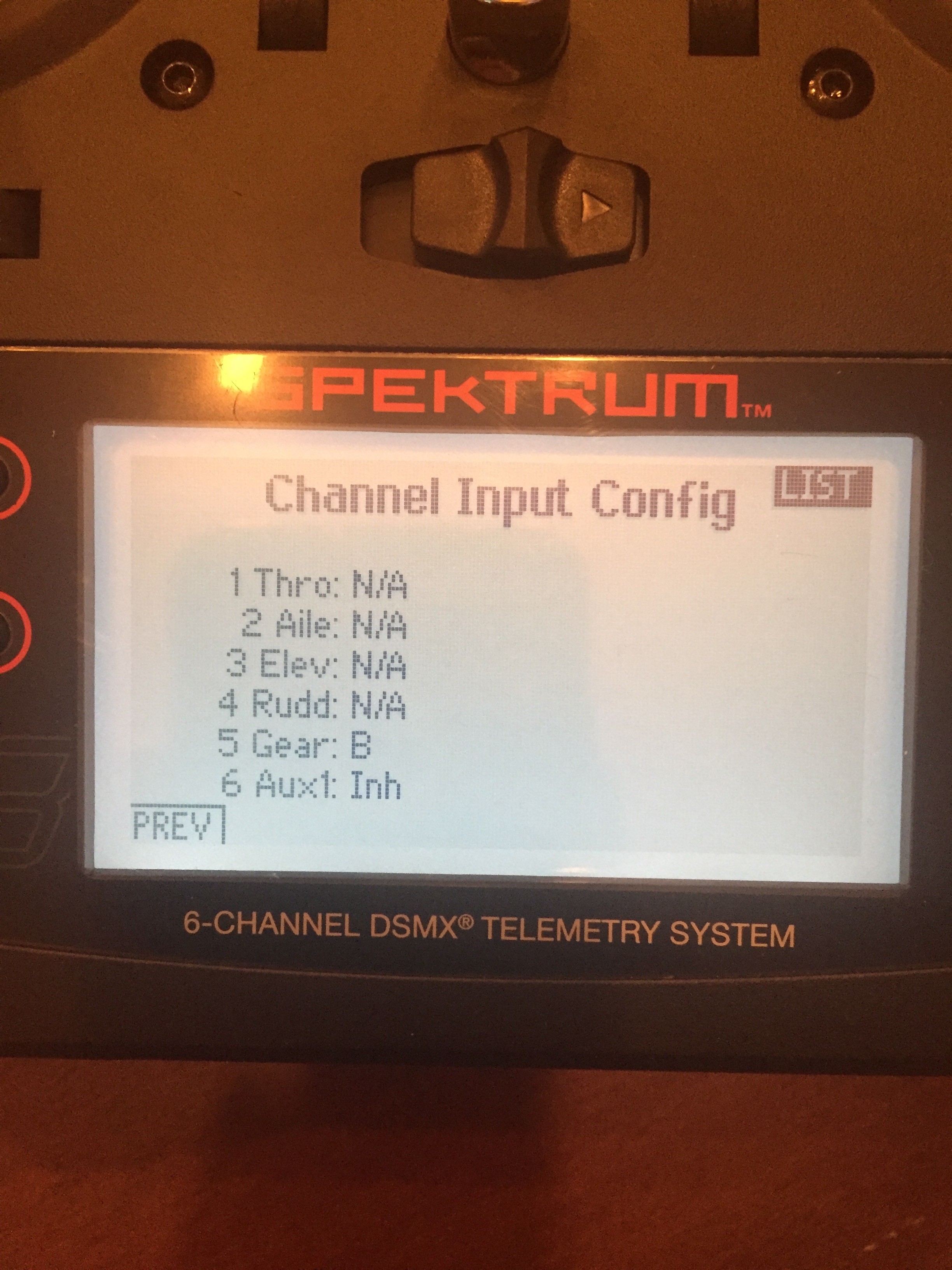
I wonder if you would mind looking at these pics of DX6 Channel Assignment. It all works right in radio calibration - but it seems like a complicated and un-intuitive way to do it so I wonder if there was a simpler path. It seems like the default naming convention in the controller just doesnt match how APM does business (which is fine as long as I am safe). Also I don’t think this is really covered in the wiki, and is not at all explained in the DX6 manual so i had to do some reverse engineering.
I’ve got an older post as well that only I have replied to (and im super impatient). It is a question not a complaint - maybe these boards are too developer focused or high level for me. DIYDrones looks good too.
Reversing is not done within mission planner but within the transmitter. For DX6 - go to Servo Setup and change travel to reverse, then reverse the fields as necessary.
For my setup I have had to reverse Yaw, Pitch, and Roll. According to the wiki, on the radio calibration screen all of the bars should move in the same direction as the controls sticks EXCEPT for pitch.
The difference you are seeing is due to the different pin assignments between JR/Spectrum and Futaba.
On an Rx the JR output is TAER but on Futaba it is AETR.
You can run the Tx in default mode as long as you connect Rx out 1 to FC in 3, Rx out 2 to FC in 1, etc. as the FC’s use the Futaba pin assignment.
Or you can do it as you have done and rearrange the channels in the Tx.
The reversing as you have found out is also done in the Tx.