Dont worry about google so much or any old youtube videos, go straight to the Arducopter doco.
Specktrum
That receiver will still need to connect to the “PPM/SBUS RC” port on the Pixhawk via some method. Arducopter will automatically detect the RC protocol in use. Ignore the connector labelled DSM.
DSM2 is just the radio standard used between the transmitter and receiver, it’s not the RC signals that come out of the receiver to control servos or anything else.
The trouble you have is that receiver is an ordinary RC Plane job with individual channel outputs. The Pixhawk (and all recent flight controllers) are expecting one RC input with all channels combined. SBUS is ideal, but PPM and some others are OK too.
One of these might be OK as a receiver, it theoretically works with your transmitter but I’ve not seen it done:
BUT
you have a DX5E, which is only 5 channels and no longer supported.
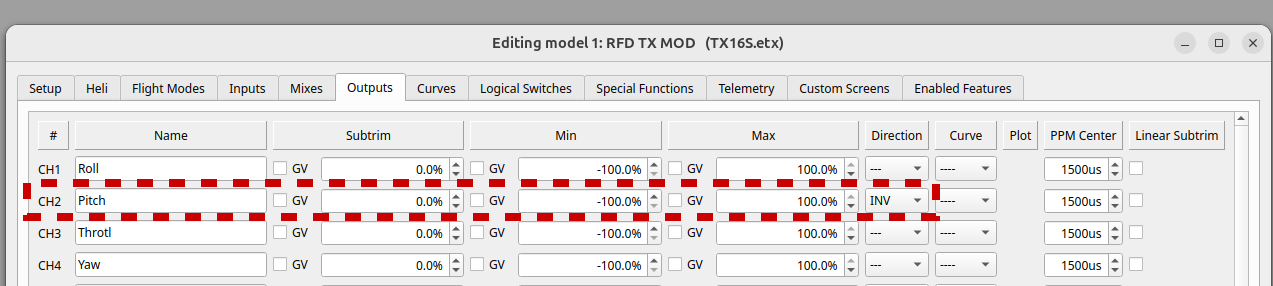
Even if you get the receiver connected to the flight controller, you are going to struggle with just 5 channels - that’s pitch, roll, throttle, yaw, flight mode. Technically all you need for a couple of the normal flight modes, but you wont be able to set a switch as “Return to Land” or have any of the other nice functions at your finger tips.
The sik radios will give you those abilities, but reaching from your RC over to your laptop could be less than ideal.
So let us ignore all that Spektrum stuff unless anyone can help with a better solution that buying the Hobbyking receiver and trying to live with just 5 channels.
RadioMaster Boxer
This will be the way to go, future proofed but a bit harder to set up.
The receiver will need to connect to the “Telem3” port on the Pixhawk.
+5 → +5
tx → rx
rx → tx
GND → GND
Then there is a few other settings to do once you’ve got that far.
SERIAL5_PROTOCOL,23
SERIAL5_OPTIONS,0
RSSI_TYPE,3
RC_OPTIONS,8224 -> it is probably 32 now
FLTMODE_CH,6
ELRS has channel 5 dedicated to Arm/Disarm, so during transmitter setup you can choose a switch to assign the channel 5 for easy arm/disarm, maybe too easy!
Then there will be some transmitter setup too, but we can go through that when you get to it.