Significant discrepancy between desyaw and yaw after autotune … can anyone help me.
I attach image of the graph.
WeTransfer - Send Large Files & Share Photos Online - Up to 2GB Free
Significant discrepancy between desyaw and yaw after autotune … can anyone help me.
I attach image of the graph.
WeTransfer - Send Large Files & Share Photos Online - Up to 2GB Free
The tune isn’t good on any axis. Pitch and Yaw are particularly bad. I would set the PID’s back to pre Auto Tune, or where it was stable, set Auto Tune aggression back to default (.1) and try again.
Hello … Dkemxr Dave
Thanks for your help … can you tell me how do I report the pid default values …
the autotune_AGGR did it with the value 0.075
Did autotune axis x axis … doing both the pitch and the roll the drone moved energetically … very jerky while then when I did the yaw it made only small movements … small clicks … nothing comparable to the movements made by doing autotune on the picht and on the roll … and this I cannot understand what it is due to
It is due to the fact that the yaw authority is significant lower than the R/P authority. It is normal and expected unless you have tiny props.
950 Kv motors propellers 9450 dji drone wheelbase 36 cm weight with 1250 gr battery
Dkemxr advised me to bring the pid to the default values and the autoune agrr parameter to the value 0.1 …
Here I was wondering how do I x restore the pid values to the default ones ??
Your opinion on this thing and evaluating the attached bin files which one ???
Reset the pram file keep it stock “PIDs” and test fly it you should not need to do any tuning for this 960 kv size motors. Only tune it if you have issues but never before you test fly first.
Start over redo all the cals as if it was a new build just don’t tune the PID yet . You can backup before if you like. MY option is based on 7 years of building with a 1% failure starting with the Nase32.
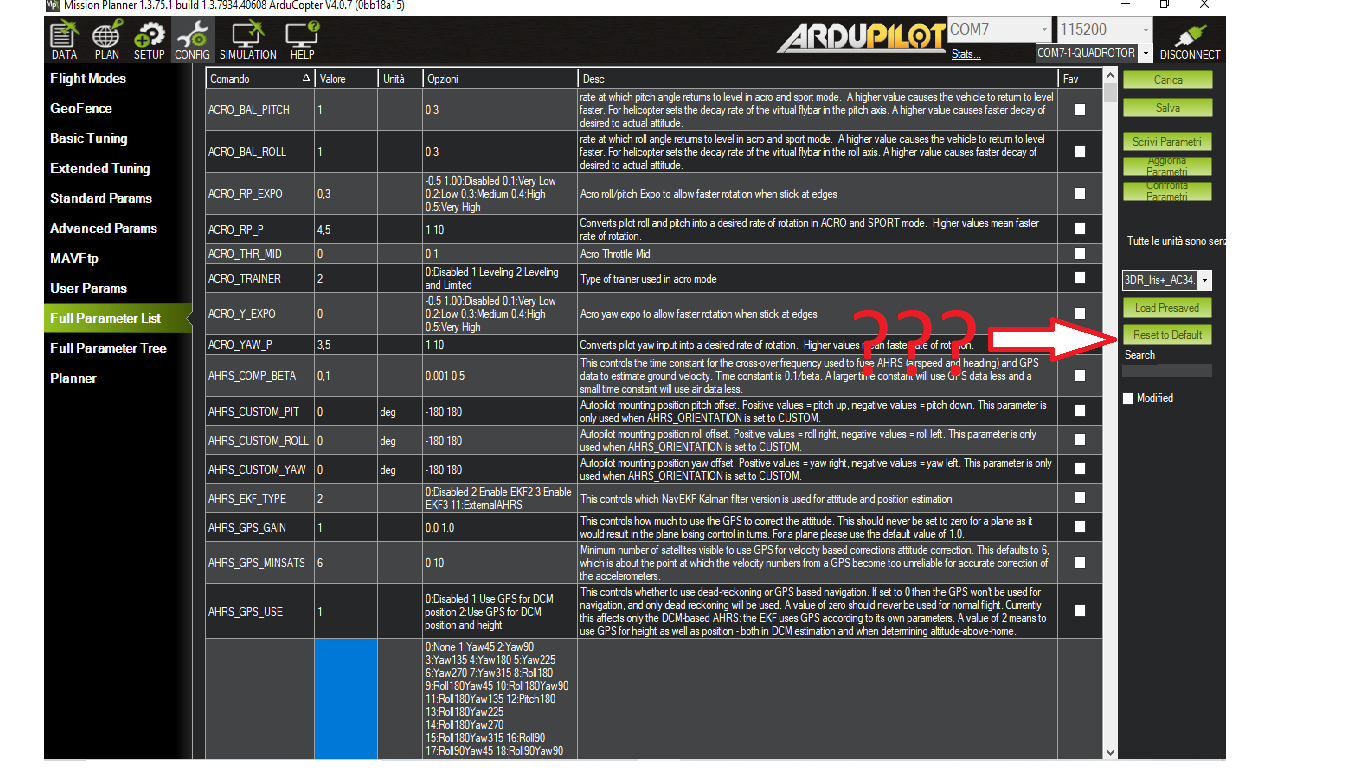
If you hit that button everything will be reset and you will be back to the start of the configuration like you loaded the firmware for the 1st time. Start with the Frame type… If you start the Simulator in Mission Planner for a quadcopter the PID’s shown will be the default values. You could manually change yours to those preserving all the other parameters, configurations and calibrated values.
That’s the idea. ![]() lets not forget we are dealing with basically a text file that could have bad information on it. Why we reset.
lets not forget we are dealing with basically a text file that could have bad information on it. Why we reset.
Let me address that you can backup the file your replacing by saving to USB or hard drive. 101 in the building of quads. Once you get good one can recalibrate in less than 1hr.