My rover is easy shutdown when turn the rover faster or forward. if the rover smooth forward or turn, it is OK. Monitor the current peak just is 18 AMP on the station.
My motor driver support 60AMP peak.
What is reason of shutdown.
The first thing I would do is look at the battery voltage in the log file. Maybe the large current draw is momentarily causing the battery voltage to drop too low.
1 Like
The voltage didn’t drop too low in the status, from 29V to 28.4V. How to prevent the power shutdown?
And would you tell me how to check the battery voltage in the log file. I can’t find the .bin or .log files in logs folder. There is only .tlog files.
The .bin logs are on the Flight Controller. Download them from there.
1 Like
below is my Rover log when the power shutdown.

Log File C:\Users\joshz\Documents\Mission Planner\logs\GROUND_ROVER\1\2019-12-29 12-50-04.log
Size (kb) 12041.0751953125
No of lines 153749
Duration 0:02:18
Vehicletype ArduRover
Firmware Version V3.5.0
Firmware Hash af36fc5e
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = NA -
Test: Brownout = UNKNOWN - No CTUN log data
Test: Compass = FAIL - Large change in mag_field (92.25%)
Max mag field length (830.70) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = WARN - Check vibration or accelerometer calibration. (Mismatch: 1.03, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = NA -
Test: NaNs = GOOD -
Test: OpticalFlow = FAIL - ‘FLOW_FXSCALER’ not found
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = UNKNOWN - No CURR log data
Post a link to the .bin log file. That Auto Analysis output is of little value.
When you make a turn or accelerate the battery voltage drops 7V in some instances. Give a description of your vehicle.
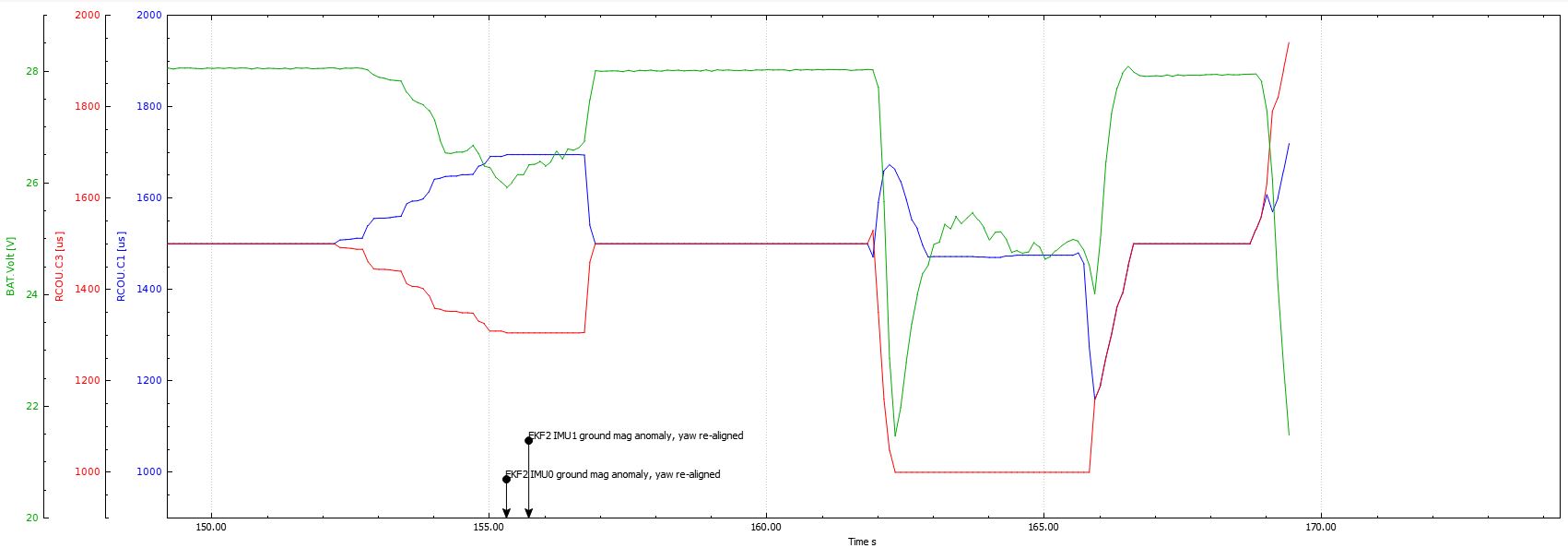
my vehicle has 2 180 watts wheel chair motors using RoboClaw 2x30A Motor Controller, it is about 30 KG heavy. The battery is 24V 25AH. when load more than 40 KG (total about 70 KG), it will be happened easily.

how to prevent current up to 22 amps.
There are settings in the RoboClaw controller to limit the maximum current the motors will draw.
1 Like