The past few months were dedicated to planning a catamaran build out of PVC pipes which will be used for mapping lakes with a simple deeper pro plus Sonar.
Finally all parts arrived. And after testing some basic stuff it’s finally time to actually build something.
I’d like to share my progress to maybe get some last minute suggestions.
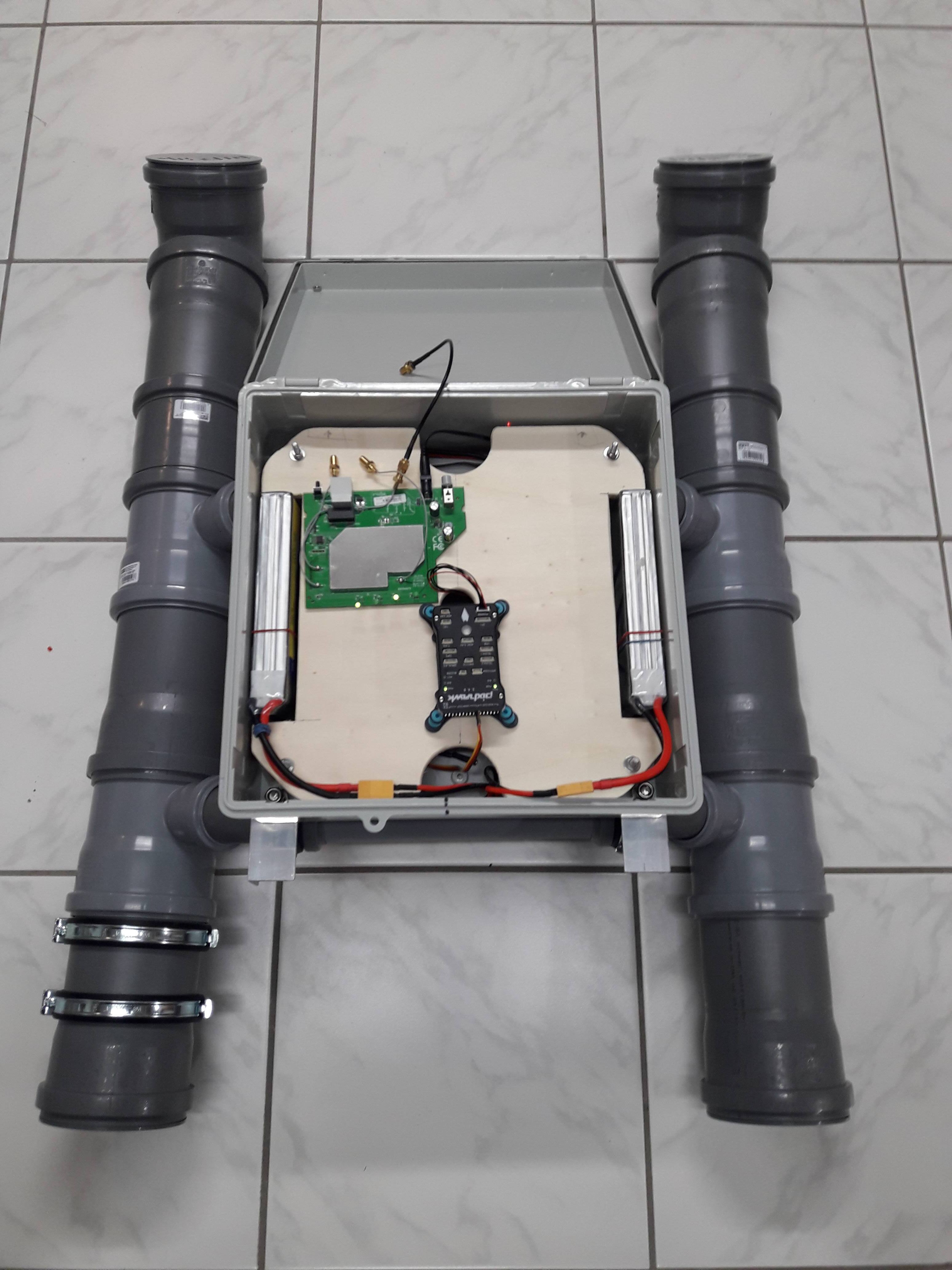
Yesterday I mounted everything on a “training board” to check if my concept works. Next step will be cutting some holes in the case and transfer everything to the actual boat.
Still on the to do list: integrating a BEC which powers a wifi router to repeat the sonar signal, calibrate the esc and tinker with the parameters.
Interesting, thanks for sharing.
A couple of questions:
what are the TP link antennas connected to ? I guess it has to do with sending sonar data to shore, right ?
I see 2 batteries: are they powering the motors individually ? Or are they connected in parallel and both powering both engines ? The latter would allow better use of the full capacity, otherwise which ever discharges first will prevent you to steer…
You’ve got some Hawkeyes mate. Those are indeed tp-link antennas.
They will be connected to a a tp-link WA901ND which will then repeat the sonar data to the shore. On shore will be a small base station with another tp-link. This is due to the deeper sonar only working via wifi and the original app.
The tp links are flashed with OpenWRT firmware and have a range of over 600 meter.
The batteries (2 × 3s 10.000mAh) are in parallel. To prevent exactly what you said. I don’t want one thruster to shut down just because 1 battery is empty.
The thrusters are totally able to go in to reverse.
I’m using the ZTW Shark 50A ESC.
They do have an option for water cooling. But I’m not planning on using that.
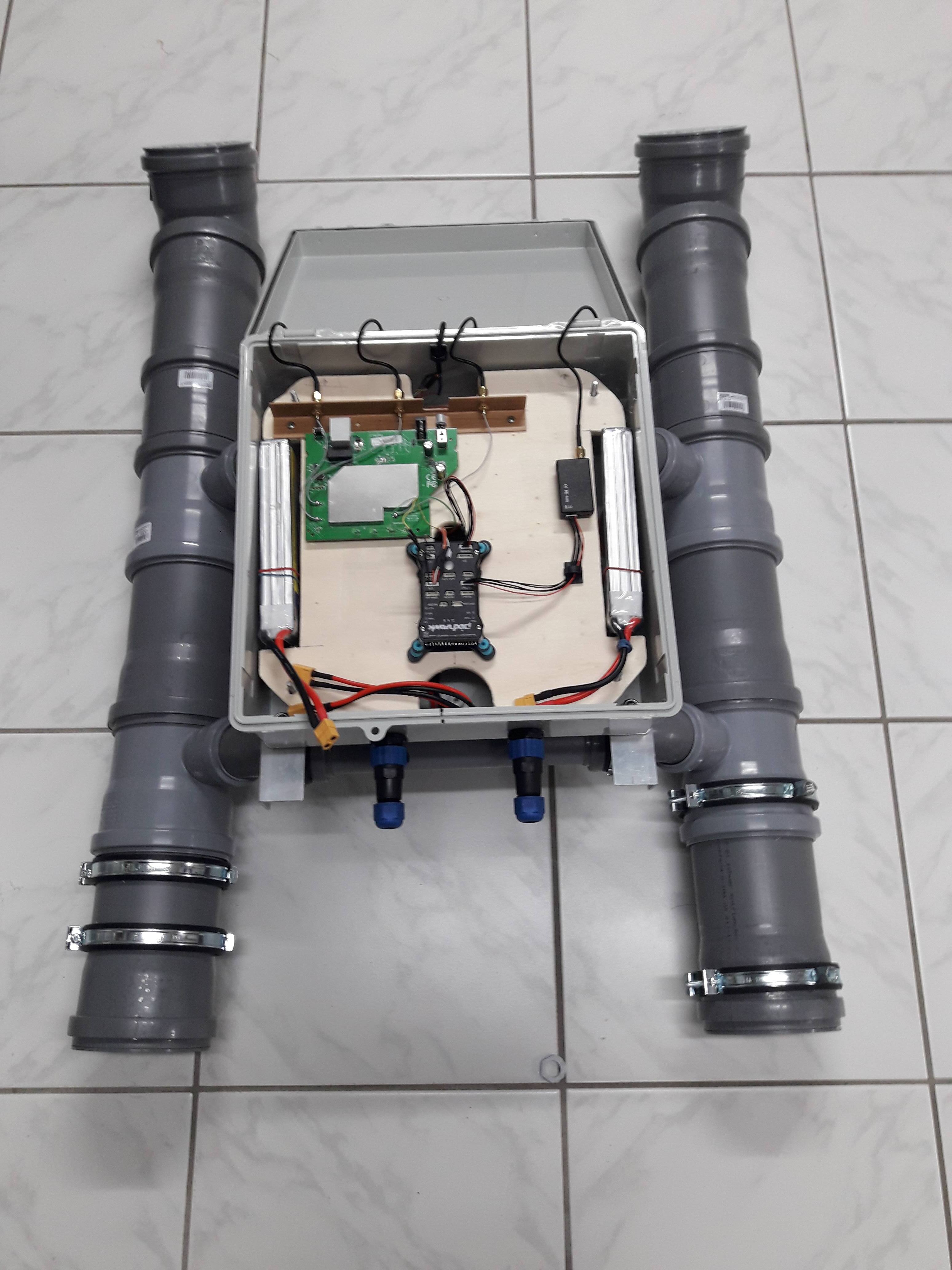
Here is my newest progress by the way.
I had the idea to fully utilize all space that’s given. So I raised the wooden board by about 6cm and put all the ugly power stuff underneath.
So the 2 ESCs, parallel adapter, pixhawk power module and a step down converter for the wifi router are hidden.
I also cut two battery bays, so they won’t jiggle and I don’t need to use any kind of tape.
Top floor is now nice and clean. There will be more leads for antennas, telemetry and gps and what not. But I’m trying to keep it clean.
Yesterday i mounted all the antennas, made an rail for the sma cables and mounted the IP67 connectors which will connect the thrusters.
So I’ll be able to unmount the box without the thrusters. Or unplug the thrusters if needed.
I’ve been planning to do similar style boat, and it was amazing to stumble to your work.
Couple of questions:
What is the diameter of the pipe and other dimensions of the boat? I’ve been planning to use 160 mm pipe with 1000 mm length. This would provide plenty of buoyancy with low enough weight and small enough to fit in a car.
What are the specs of the motors and propellers? Have you tested what kind of speed and operating time you are getting? For me, this has been quite difficult to estimate as I would need hours of operating time but also decent performance.
What is the box containing the electronics? I’ve yet to find box with low enough profile to keep the center of gravity low enough.
But thanks again for sharing this and I’m hoping to see how you advance with the project!
Glad i could spark some inspiration. I had the same problem when i started building. There are only a hand full of people in the internet who built something similar and willing to share their knowledge. Would be awesome if you’d share your project with us too.
The pipes i used have a 110mm diameter. Combined with a size of 97cm(L) x 65cm(W) x 45cm(H) this provides a pretty stable platform which is low enough to (hopefully) not capsize.
The pipes provide a theoretical buoyancy of about 12-13KG. Being just shy of 10kg of weight, this is enough. But the boat is heavier than i had estimated.
But just like you said; it fits nicely in pretty much any car.
The motors are some cheap china knock offs. I am planning on buying some better thrusters at some point, due to these propellers breaking very quickly. (Already shredded 3 of them). But they are able to provide around 6kg of thrust together at 100%. This means a power consumption of around 15A and thus draining the battery in about an hour.
However, since i don’t need the full speed of 10km/h for my mapping project i’m cruising along at about 25% throttle to reach 3km/h and a power consumption of 3-5A.
I eidn’t do any long range test until now. I’ll share any more detailed results here.
But it seems that i can drive for about 4 hours at 3km/h. Anyway, i Need to test that.
By the way: the box is just a simple electronics/junction box with ip65 rating.
They’re not cheap on the european market. Hence why i bought it in china.
How’s the project going? Did you process the deeper sonar logs in reefmaster? I’m doing a similar project using a boogie board and deeper sonar. I work for a golf course and we want an accurate water holding capacity for all of our irrigation lakes. We don’t have any vegetation or debris on the water surface so I don’t think my thrusters will have a problem. I finally got the shark ESCs working yesterday and I’ll mount everything today. Hope you can share more about the outcome of the project! Very exciting
I had the project on a hold for quite some time now, because I started a new job and was busy with my other hobby. I also was at a point where I was not quite satisfied with the deeper and looked for an alternative sonar.
However, the project itself does quite well. But I’m planning on getting rid of the WiFi connection. I bought a new lowrance elite 5 with Totalscan transducer and want to transmit the nmea sonar signal via some frequency other than WiFi.
Anyway: I do process the logged sonar data which I got with my deeper in reefmaster yes. If you got the hang of it it’s quite an easy process.
But you will need to upload your deeper map to maps.deeper.com. there you will find an option to download the sonar data as a .CSV file which you can easily import into reefmaster.
Reefmaster than can calculate your total water volume.
For what you’re looking for I think it will work really well. Since you don’t need a range greater than 150-200 meters (which is what I’m getting)
Keep us up to date with your project. Always nice to see other bathymetry boats
I will post some updates here in the upcoming months too. The project is about to take quite some radical changes.
Thanks for the info. I was able to map my first pond using the deeper pro+ and reefmaster. I too had issues with the wifi connection. instead if trolling behind the boat i think ill try to somehow mount it inside the foam with bottom half in the water and the top half exposed. Maybe that will give me a better signal. one motor got stuck in some debris, it still works but the boat now veers to one side. I’m going to get it replaced and keep mapping. I also need to figure out the best solution to keep the componants cool. there is no air circulation in the box. the ESCs have ports for water cooling. Anyways ill keep everyone updated on how its going. here is a link to a short video. Sorry about the quality.