One pitfall many users have reported is a fear of upgrading both firmware and software. I too have a fear of updating Mission Planner because of the number of times that features have broken on the newest non-beta releases.
Why does Mission Planner not appear to have “stable” releases, and what is causing all of these immediate changes that appear to happen overnight?
Mission Planner appears inconsistent with the rest of Ardupilot’s release documentation of new features and critical bug fixes. Most of the community, myself included, cannot interpret the majority of commits from github. I don’t think those commits replace a high-level change log.
What do you think about Mission Planner, and how much do you trust the latest upgrades?
Mission Planner is great and I can’t remember the last time I had a problem. The only problem I have had is downloading the newest. Server seems down a lot. I only upgrade one computer at a time though just in case.
I have seen features break on the latest beta build but often times they aren’t critical and if you raise an issue Michael wil usually fix it. I think this is really a one man show @Michael_Oborne is really the only fella I have seen work on it, I may be mistaken. But that seems like a lot for just one fella to do.
I agree it’s probably a lot for a one-man show. Maybe it’s just me who runs into the problems. I have seen contributions by others, but you’re right @Michael_Oborne does a LOT!
I want to steer this topic away from a staffing and personnel discussion for now, but I am interested in how you feel about the program and the releases.
Well… I don’t know if having people test release candidates would be practical. Who would test all the features. And, although I’m not sure, I think a lot of the new releases are to keep up with the new Ardupilot versions always being released. What kind of problems have you experienced?
Mission planner is an impressive, and very feature rich, one man show. And that’s about it
If you prefer to have stability and reliability over a ton of bells and whistles for things that fly, or be sure stuff works after a day of travel to the place you will do the job, stick to MAVProxy, APMplanner2 or QGC.
Each and every of those can be run on reliable OSs, not only windows, and each have some level of peer review of changes.
Personally, I have had two issues after upgrading to stable releases. One time the camera triggering icons wouldn’t appear on the live map, and the other time the radio RSSI values were gone.
I’m concerned that things like this are broken on “stable” releases where bugs are inadvertently introduced.
Regarding using other GCS’s, yes that’s always an option, but I really like Mission Planner’s features, and it appears that is tied to ardupilot (it bears the logo, same github repository, documentation location, etc.). Being tied to ardupilot, I expect the same quality that ardupilot advertises for reliability, etc. 90% of the user-experience comes from the GCS, yet it sounds like there’s only one person that is responsible for development.
I have also had issues with mission planner which were usally fixed quickly on reporting, but it makes it difficult for me to be confident in upgrading it to the latest version without being afraid of breaking something.
I too have an issue. In using Mission Planner doing Radio calibration the trim levels are not set properly, my version reports as 1.3.62 on the splash screen. Some suggested using the latest beta, but one I am unsure if I want to do that and 2 where would I find it, WilI I have to compile it, etc.
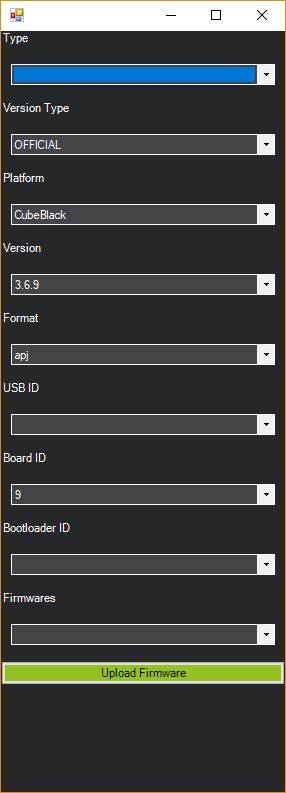
Hi all, I agree there should be some better documentation. The current issue I have is that it appears firmware loading now takes you through some other screen such as below which I never knew about… or I am doing something wrong… either way I don’t know… hence the need for someone to advise about changes such as this.