Changing Simulation Speed
The plugin currently does not implement speedups requested from SITL (i.e. the frame_rate in the servo packet sent by the controller is ignored). However the simulation speed can be controlled from the Ignition GUI.
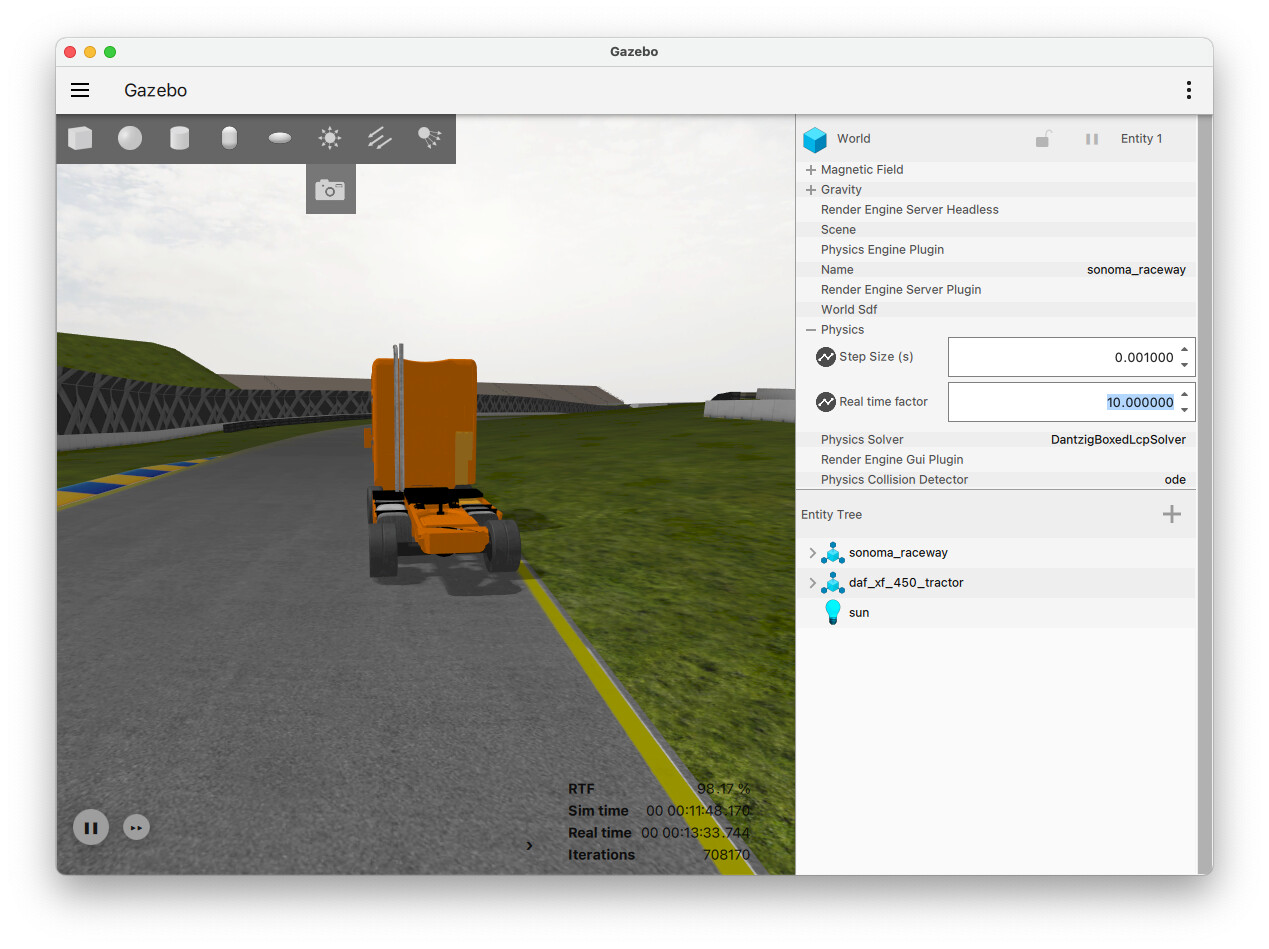
- Click in the scene and enter ESC to select the World
- The World component should display in the Component Inspector
- Click on Physics
- Set the Real Time Factor to speed up / slow down the simulation (in practice you may get between a 1.5x to 5x speed up depending on what’s being simulated and the network connection to JSON-SITL when using lock-step)