Does Mission Planner allow to activate the GLOBAL_POSITION_INIT forwarding for ship landing setup as MAVProxy does with the command set fwdpos true?
right click the map, and set “forward between links”
ok, I will try
thanks
Should any winndow appear aftert clicking? Unable to select messages to forward?
how does this option work?
@Michael_Oborne , I connect rover (beacon by USB) and VTOL (Dragonlink telemetry) with different SYSID; if I click “Forward between links” apparently nothing appears, no popup to select.
@Michael_Oborne , Both links with GPS FIX, right click the map, and set “forward between links” but in the messages tab it does not appear:
“Have beacon” or
“Set follow offset (…)”
which would be the packet forwarding test
or is UDP mandatory?
Hello
Do you have a solution to the problem of “forward between links”?
Or is there any other way for the plane to get the GLOBAL_POSITION_INIT message of the beacon
Sorry, I have not been able to get the message “have beacon” with “Forward between links”
got it
thanks for your reply
Next week I will test with a new hard. If I succeed I will tell you.
Hello
I think I should have successfully forwarded the beacon’s GLOBAL_POSITION_INIT to the plane through MissionPlanner.
Please configure your device according to the following process (this teaching process is just a demo to forward the GLOBAL_POSITION_INIT of the beacon to the plane through MissionPlanner, it is not a formal teaching, if there are any mistakes in the explanation, please advise and supplement):
-
Prepare two sets of data transmission (data transmission A, data transmission B), one set of data transmission (data transmission A) connects beacon and GCS; another set of data transmission (data transmission B) connects plane and GCS, here refers to GCS is the same computer!!
-
Open MissionPlanner, first connect to any vehicle (beacon or plane) through data transmission.
-
After successfully connecting to a vehicle, right-click on the MissionPlanner top list >> click “Connection Options”, as shown in the figure below.
-
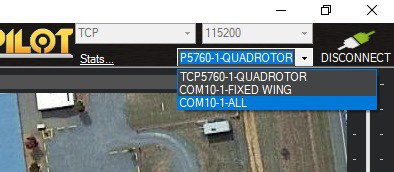
Then connect to another vehicle through the newly-appeared “Connection” selection box,The screen where the two vehicles are successfully connected is shown in the figure below.
-
After the connection is successful, two vehicles will appear on the MissionPlanner map. At this point, right click the map, and set “forward between links”, then the GLOBAL_POSITION_INIT of the beacon can be forwarded to the plane through MissionPlanner, as shown in the figure below.

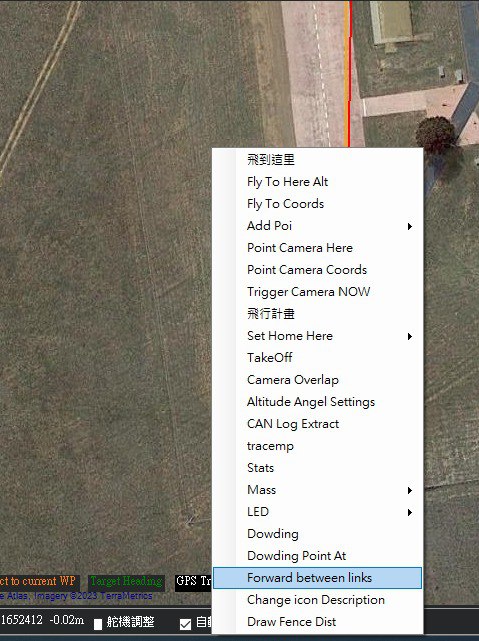
Yes, that’s how I do it but after forwarding between links, nothing happens, “have beacon” should appear in the messages tab or in the HUD
Hello, I have a question. How to use the command fwdpos true to forward in MAVproxy.I look forward to hearing from you
I’ve found that sending the lead vehicle telemetry via the GCS can be laggy and unreliable. A better answer is to send the telemetry directly. I used SIK Telemetry radios in the lead and follow vehicle which worked well. There might be other ways.