(4) 24V motors
(1) Sabertooth Motor Controller
(1) Pixhawk Orange cube
(1) Lightware SF45/B LIDAR
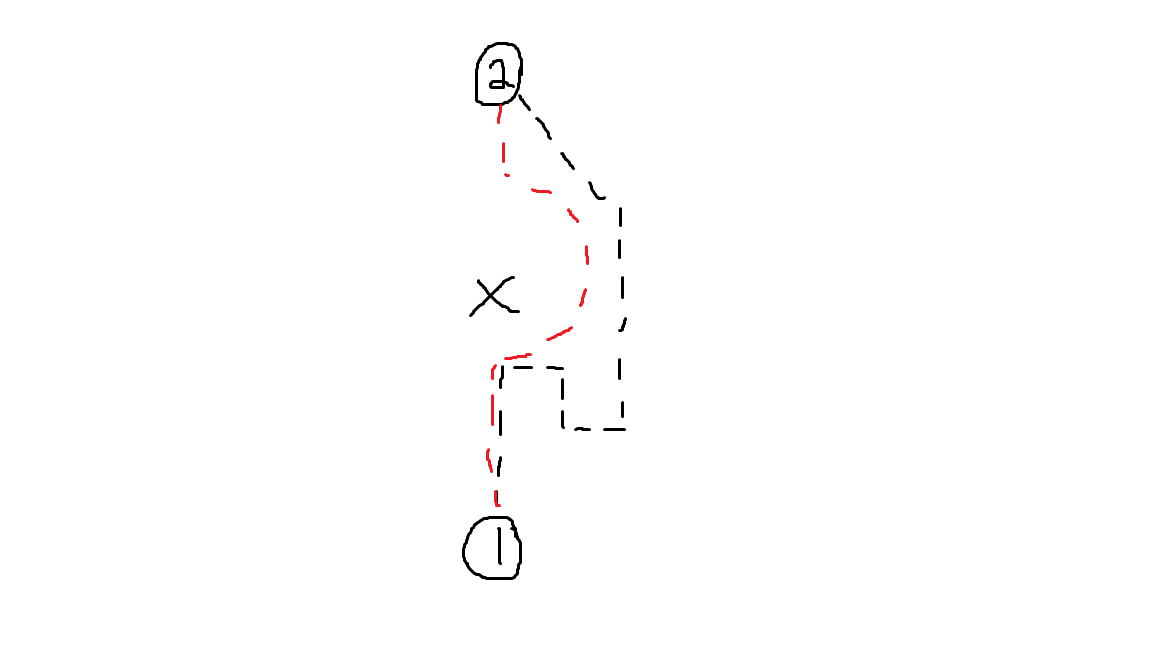
My problem is that I do not feel as if the Rover avoids obstacles correctly. It will see the obstacle and move away from it, however it does not do it in a smooth or probing pattern. Instead the rover will sense the obstacle, turn 180 degrees away from it, then turn 90 degrees back towards it’s destination, then back to the 180 degrees away from destination, back to 90 degrees (same as before), then will continue on towards it destination. I will attach a hand drawing of how the rover reacts to obstacles. I will also attach the parameters that are uploaded to the rover that are associated with the OA and AVOID parameters. If anyone could give me some advice on what to change or what may work that would be greatly appreciated. Thank you in advance.
P.S. I am using ground steering and throttle on channels 1 and 3 respectively. I did this for easier control using only one stick in manual mode. These problems mentioned above occur in auto mode. There are 4 independent motors on my rover that all are driven by the sabertooth motor controller.
The Black line is similar to what the Rover is doing now. The red line is what I would like the rover to accomplish in the future. The x in the middle is the obstacle that the rover senses. Thank you again.
Hi there,
Logs would be helpful. Since you are in auto mode, can you please disable Simple Avoidance and only use path planning… i.e AVOID_EANBLE = 0 and OA_TYPE = 1
Also, can you disable the proximity filter, i.e. PRX_FILT = 0
Please have a go at trying this and then posting another log
I am attempting to upload the LOG file but cannot get it to upload because it says that it is too big of a file… I am sure I am missing something simple.
It seemed to behave the same or possibly worse with the changes that I made. It would go up to the obstacle, spin in a full circle, and then repeat the behavior that happened before the changes as well. I am new to the Log analysis stuff and am not really sure how to read and analyze them. Thank you again and I hope to get another quick response.
in the log that you have provided me, both Simple avoidance and BendyRuler are active… It’s really hard to tell what’s going wrong when two different obstacle avoiding algorithms are active at the same time ( its tough to pinpoint which algorithm is giving you the trouble).
Also, why have you changed the OA_DB_ parameters? I would suggest using the defaults unless you absolutely certainly know what you are doing
How do you turn off the simple avoidance? I looked into the parameters and cannot seem to find where to turn off simple avoidance? Also, I tried switching the steering mode from ground steering and throttle over to skid steering type (throttle left and throttle right), this seemed to act more as I had envisioned the rover avoiding obstacles but took a toll on how it took the corners and affected my manual control of the rover as well.
It would probably be good to tune the vehicle as well. I only had a quick look but it seemed like most ATC_ parameters were left at their default values.
Here’s a picture of the steering response and it’s not too bad but it looks like the actual turn rate (in green) is overshooting the target by at least 50%.
I believe this is due to the fact that I was testing on some gravel. I will however try to re-tune the vehicle and run another trial in the grass to see if this fixes the issue. Whenever I set the parameter AVOID_ENABLE from 7 to 0, the LIDAR does not seem to work properly. The HUD says “Check Proximity Sensor” whenever I make that setting equal to 0.