500mm frame with landing gear, 2806.5 1300kv motors, 8x4x2 props, 4S.
So after my last round of testing, I changed props to these which seemed to help. VIBE quite a lot, from 40-50+ down to 10-15. Motors did seem to be running warm but it was mid-70s and seemed okay: Relevant Log 1
Today I decided to check some various mounting issues (found screws were loose on landing gear and battery plate, also zip tied sliding battery plate to keep rigid, and added battery pad to plate to keep secure). I also setup the harmonic notch and RPM filtering: Relevant Log 2
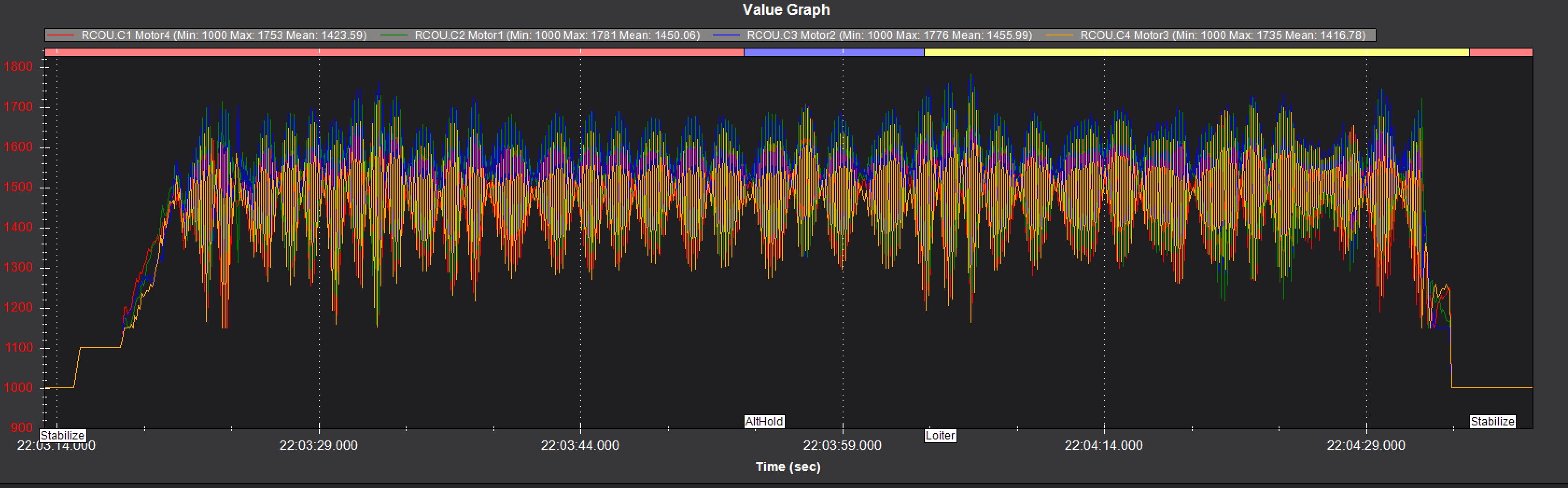
With that I was getting much higher current draw at hover and motors were especially toasty.
I rechecked my notes and found I set harmonic notch incorrectly (I had 150hz instead of 127hz for some reason). I corrected this and flew again: Relevant Log 3
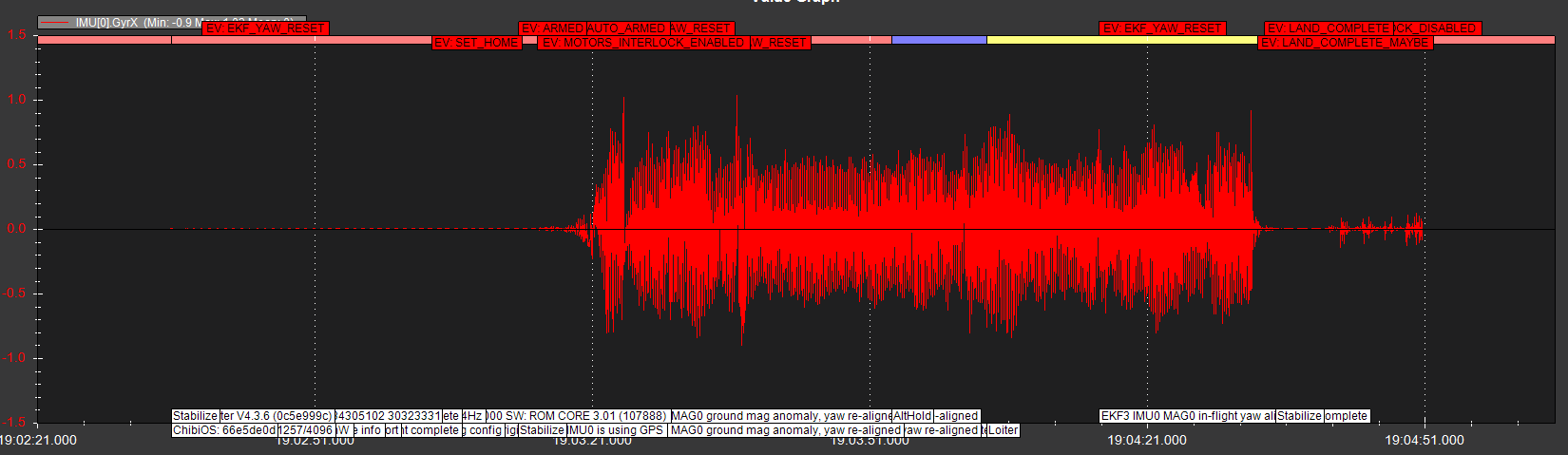
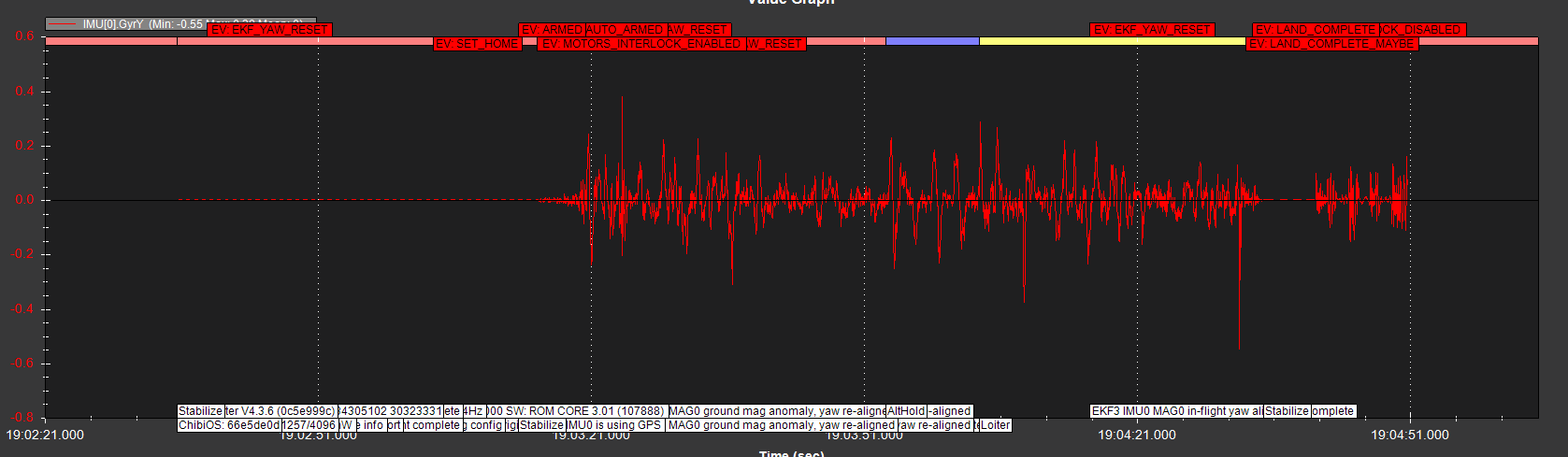
It definitely felt much smoother but even higher current draw and seems I am getting some nasty gyro noise in X (IMU → GyroX) as compared to others. I am guessing this is due to landing gear but it’s not something I can change anytime soon unfortunately.
I would really just like to get this flyable until I can rebuild, but it seems to be getting worse.
I’ve also found I’m getting more mag align issues now (I’m guessing because of motors compensating). I haven’t run magfit yet but it was not near as big of an issue a few flights ago, now it very visible rotates to align and I get the mag errors constantly.
I feel like I missed a step somewhere.
The very odd thing is, this is the guys from my 7" build. I initially swapped it over to the new frame and didn’t chance anything and it flew quite well. My USB port broke so I had to replace FC (with same, Matek H743-SLIM), and decided to start from scratch, and nothing seems to work near as well.