I want to make an antenna tracker. I have all the tools at hand. But my antenna is not pointing towards the drone correctly. He’s looking somewhere else. Which parameters should I change to start? Which calibrations should I do and how? There is not much information about Tracker. Can you help me? Thanks.
Addition
While doing accel calibration, the pitch of my compass and pixhawk are at 90 degrees. Will I take the level with this orientation, which is one of the 6 axes, or will I take the level without orientation?
you need to set AHRS_ORIENTATION correctly, unless your autopilot’s forward arrow is already pointing in the antenna direction then you don’t need to change it.
then you do accelerometer calibration in which you need to hold your autopilot in 6 different orientations, the first orientation called level, your autopilot needs to be held as if your antennas are pointing to the horizon.
it may be easier to do accelerometer calibration before mounting your autopilot to your frame.
and then you do compass calibration and Ardupilot should automatically set compass orientation.
there are instructions also here Configuration — AntennaTracker documentation
Thank you for the information.
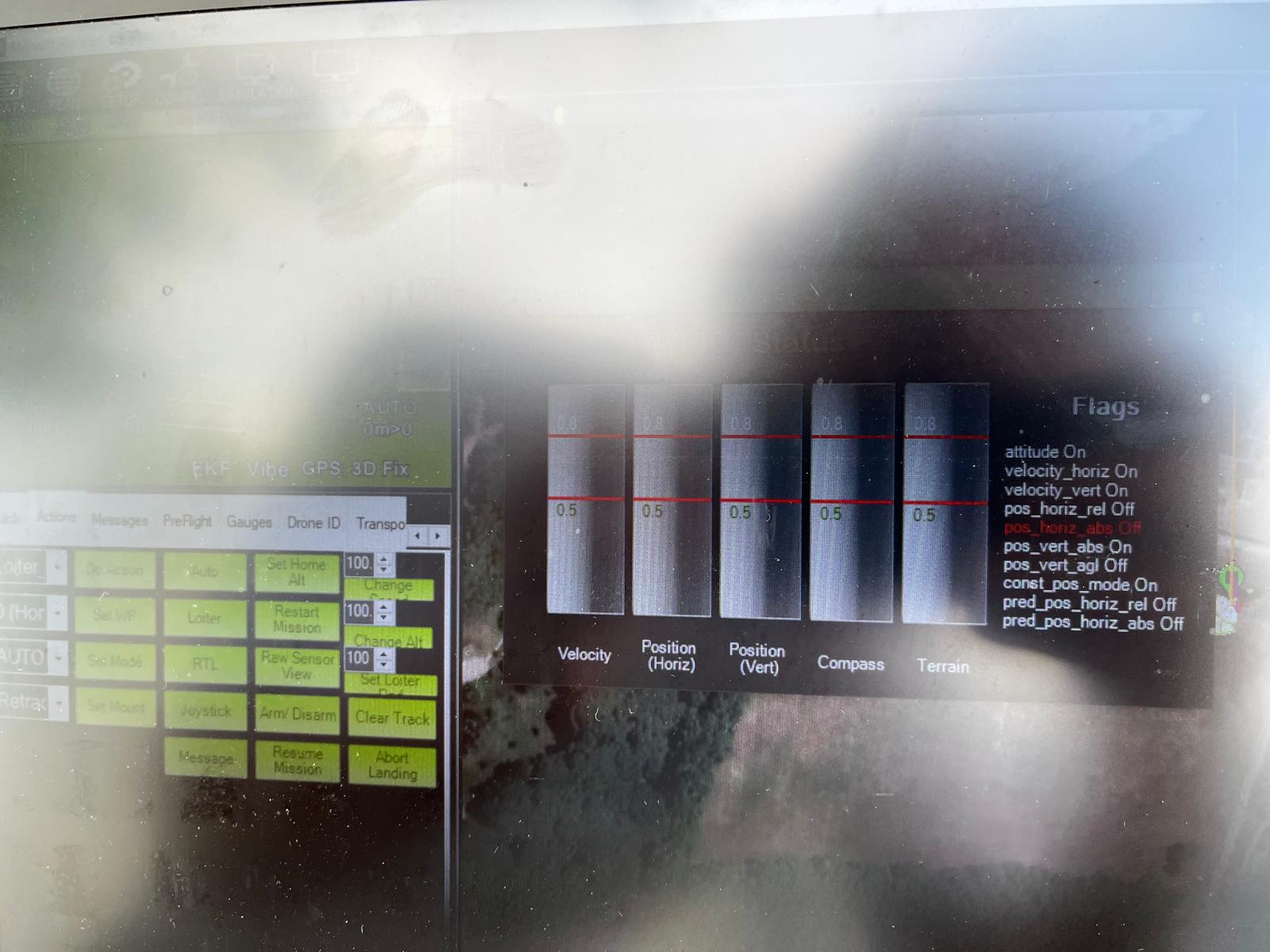
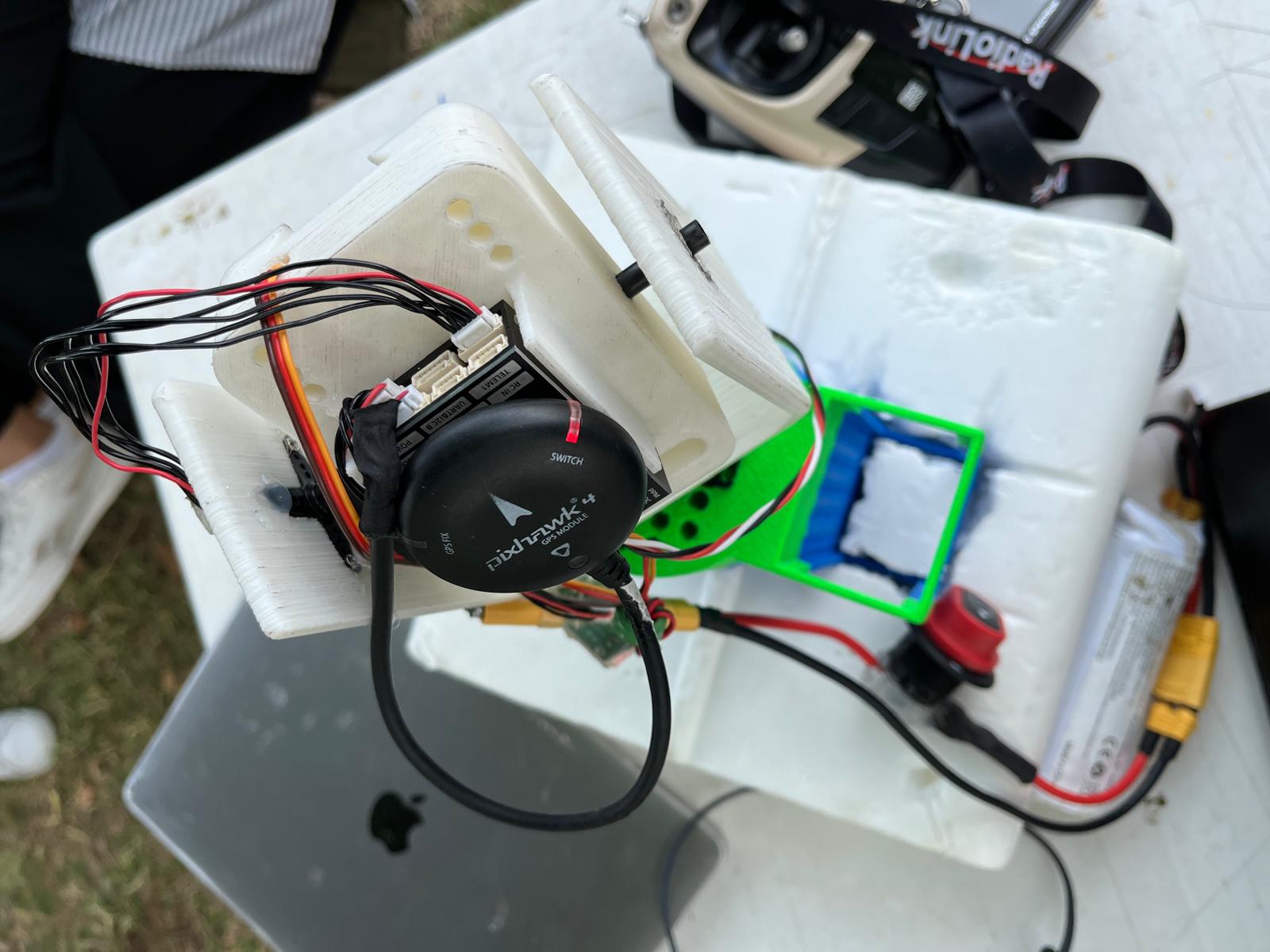
As you can see, the “pos horiz abs off” section on the EKF screen is red. What could be the reason for this? Additionally, as shown in the other image, my antenna tracker is set up like this. I have made all the settings as described on the tracker information page, but the tracker does not turn towards the drone. In auto mode, it turns all the way to the left and constantly and quickly moves back and forth on the yaw axis in both clockwise and counterclockwise directions. How can I resolve the problems mentioned above? Thank you in advance for your support and suggestions.