Hello.
I have some questions about how to set up the throttle based notch filter.
Currently, I am using Cubeange FC, 13-inch propeller and 6-cell battery, and I have completed the process from Initial Tuning Flight to Test AltHold, and I am trying to run Harmonic Notch Filtering, and I am curious about the procedure.
The following settings were completed before the hover flight.
INS_LOG_BAT_MASK = 1
INS_LOG_BAT_OPT = 4
INS_ACCEL_FILTER = 10
That’s my setup, and I’m going to do a hover flight for about a minute.
I have no idea what procedures should be followed.
I’ve read all the documents on the wiki, but there are some confusing parts, so I’m going to ask you a question about the procedure for setting it up.
I refuse to answer “Read the post” and ask for your help.
This should be the approximate settings for your throttle-based notch filter, but we wont know any better without seeing a .bin log file.
I know there is a lot to read and lot to figure out for the harmonic notch filters.
I’ve started with values that should be close for your copter
INS_HNTCH_ENABLE,1 // write this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_BW,35
INS_HNTCH_FREQ,70
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_HMNCS,3
INS_HNTCH_REF,{hover_thrust x 0.6}
So from the log we can gather the latest hover thrust value, and look at the log in the harmonic notch filter web tool, we can step through what we see and what to change.
Hello, Shawn.
First of all, thank you for your opinion!
I will provide you with the log file that has completed the flight.
Please help me.
The first log was a hover flight for about 1 minute after the next setup was completed.
INS_LOG_BAT_MASK = 1
INS_LOG_BAT_OPT = 4
INS_ACCEL_FILTER = 10
The second log is the log that flew after setting the parameters you told me.
However, I flew without modifying one parameter.
INS_HNTCH_REF,{hover_thrust x 0.6}
Your precious opinion on the log is highly appreciated!!
Hello, Shawn.
After setting the following parameters
The hover flight was conducted for about a minute.
INS_LOG_BAT_MASK = 1
INS_LOG_BAT_OPT = 4
INS_ACCEL_FILTER = 10
After that, the flight was carried out after the following set-up,
The drone rocked and flipped over.
LOG_BITMASK = 180222
INS_HNTCH_ENABLE = 1
INS_HNTCH_MODE = 1
INS_HNTCH_BW = 35
INS_HNTCH_FREQ = 70
INS_HNTCH_FM_RAT = 0.7
INS_HNTCH_HMNCS = 3
INS_HNTCH_REF = 0.43
BATT_FS_CRT_ACT = 1
There was no major damage, so I’m going to try again.
I have attached the logs and videos.
I need some help on what issues were there and what I need to fix.
Greetings,
I’m also a beginner and I’m tackling Setting the throttle based notch filter and I’m following this discussion with interest to understand how to set the various values but above all the various steps to follow.
Hi Shawn.
It was so windy for a while that we couldn’t conduct the test.
Sorry for uploading the log record so late.
There was a calm wind today so I conducted the test.
The parameters were set as follows and then flown.
LOG_BITMASK = 180222
INS_HNTCH_ENABLE = 1
INS_HNTCH_MODE = 1
INS_HNTCH_BW = 35
INS_HNTCH_FREQ = 70
INS_HNTCH_FM_RAT = 0.7
INS_HNTCH_HMNCS = 3
INS_HNTCH_REF = 0.43
PSC_ACCZ_I = 0.9839904
BATT_FS_CRT_ACT = 1
The first flight was a hovering flight for about 1 minute.
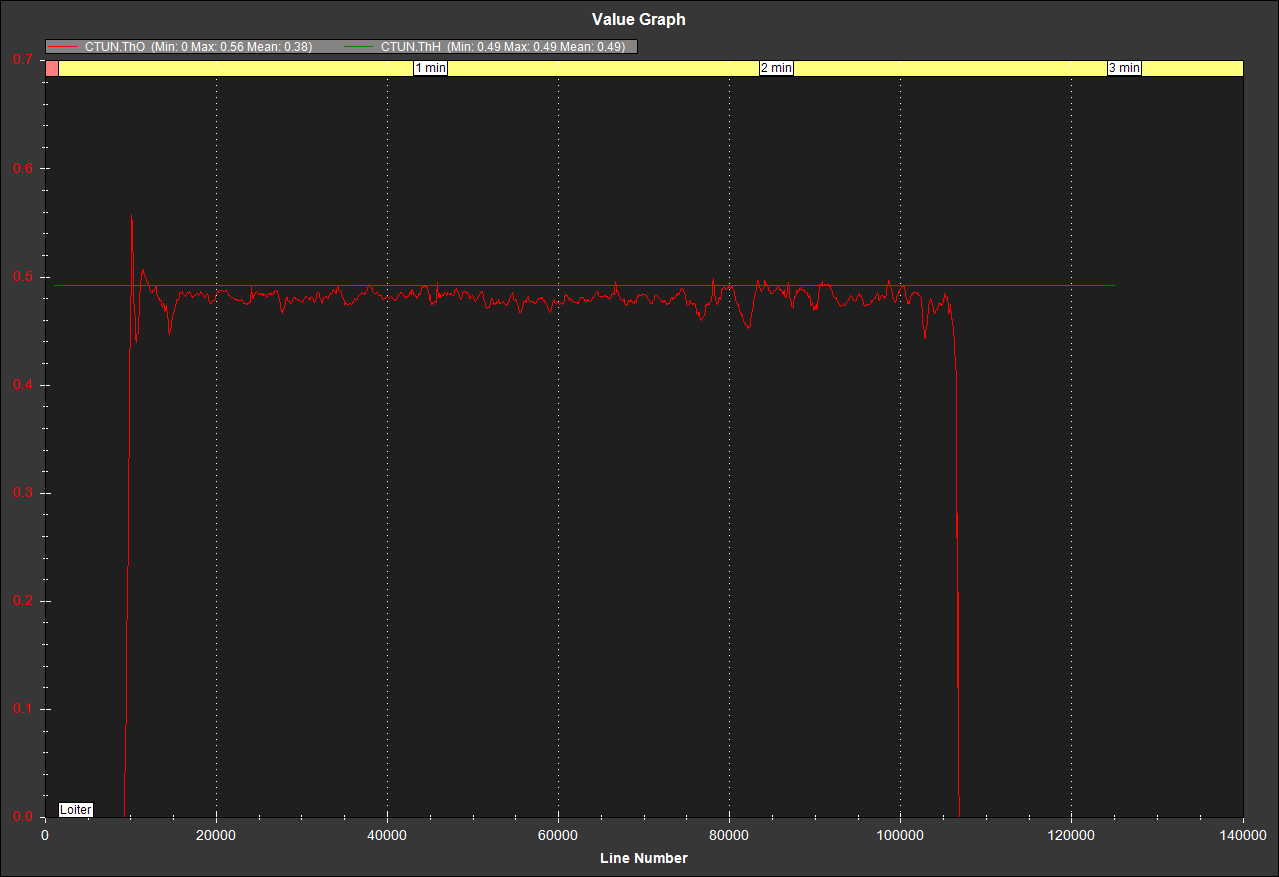
The second flight is in Loiter mode.
Please look at the log and let me know what needs to be corrected.
Thank you for your help as always.
It seems correct that the thrust is a bit low.
When raising in AltHold mode, it seems to have a tendency to be a little difficult to climb.
Can I check it in the log?